このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
特徴の検出と抽出
局所特徴とその記述子は、多くのコンピューター ビジョン アルゴリズムにおける基本ブロックとなります。用途としては、イメージのレジストレーション、オブジェクトの検出と分類、追跡、動き推定、コンテンツ ベースの画像検索 (CBIR) などがあります。これらのアルゴリズムでは、スケール変更、回転およびオクルージョンなどの処理を改善するために局所特徴が使用されます。Computer Vision Toolbox™ のアルゴリズムには、FAST、Harris、Shi & Tomasi などのコーナー検出器や、SIFT、SURF、KAZE、および MSER のブロブ検出器などがあります。ツールボックスには SIFT、SURF、FREAK、BRISK、LBP、ORB、HOG の各記述子が含まれています。これらの検出器や記述子はアプリケーションのニーズに応じて組み合わせることができます。
アプリ
| レジストレーション推定 | 2 次元グレースケール イメージのレジストレーション |
関数
トピック
- 局所特徴の検出と抽出
局所特徴の検出と抽出の利点と用途の学習。
- 特徴点のタイプ
いくつかの種類の特徴の点オブジェクトを返したり受け入れたりする関数の選択。
- 座標系
ピクセル インデックス、空間座標、および 3 次元座標系の指定。
- bag of visual words を用いた画像検索
コンテンツ ベースの画像検索 (CBIR) システムを使用して、クエリ イメージと似ているイメージ コレクションからイメージを検索します。
注目の例

カスタマイズした bag of features を使用した画像検索
この例では、カスタマイズされた bag of features ワークフローを使用してコンテンツ ベースの画像検索 (Content Based Image Retrieval: CBIR) システムを作成する方法を説明します。
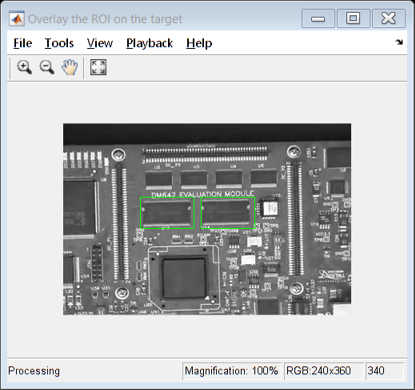
パターン マッチング
この例では、2 次元の正規化された相互相関を使用してパターン マッチングとターゲット追跡を行う方法を説明します。ここでは事前定義あるいはユーザー指定されたターゲットと、追跡する類似ターゲットの数を使用して追跡を行います。正規化された相互相関プロットには、設定されたしきい値を値が超えるとターゲットが特定されることが示されます。

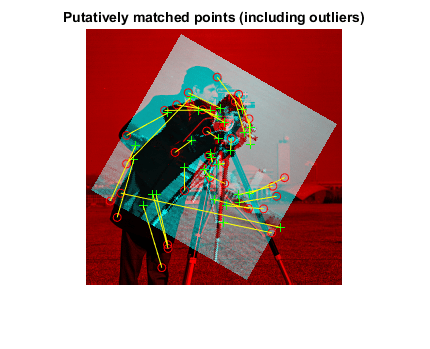
イメージ ポイント機能を使用した要素の多いシーン内のオブジェクトの検出
この例では、オブジェクトの参照イメージがある場合に、要素の多いシーンで特定のオブジェクトを検出する方法を説明します。

HOG 特徴を使用した数字の分類
この例では、HOG 特徴およびマルチクラス SVM 分類器を使用して数字を分類する方法を説明します。
イメージの回転とスケーリングの自動検出
この例では、2 つのイメージの間に見られる幾何学的変換を自動的に判定する方法を説明します。具体的には、回転やスケーリングにより 1 つのイメージが別のイメージに対して歪んでいる場合、関数 detectSURFFeatures および estimateGeometricTransform2D を使用して回転角度とスケール係数を特定することができます。その後、これらのパラメーターを使用して、歪んだイメージを元の外観に戻すことができます。

パノラマの作成
この例では、複数のイメージを自動的に繋ぎ合わせてパノラマを作成する方法を示します。イメージを繋ぎ合わせる手続きは、特徴ベースのイメージ レジストレーションを拡張したものです。1 組のイメージ ペアのレジストレーションを行う代わりに、複数のイメージ ペアを互いに比較しながらレジストレーションを連続的に行い、パノラマを形成します。
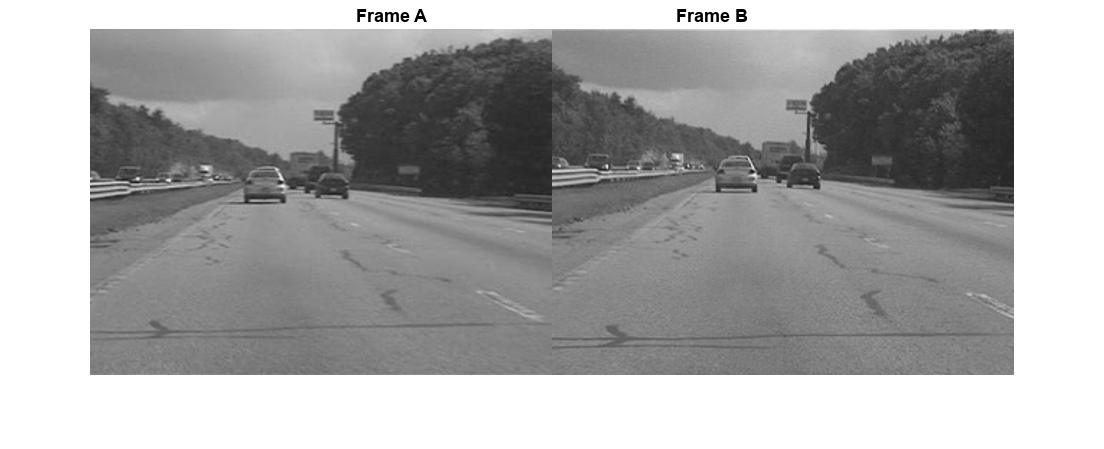
イメージ ポイント機能を使用したビデオの安定化
この例では、不安定なプラットフォームから撮影されたビデオを安定化する方法を説明します。映像安定化の 1 つの方法は、イメージ内の際立った特徴を追跡し、これをアンカー ポイントとして、それに対するすべての摂動を取り除くことです。ただし、この手続きは、最初のビデオ フレームのどこに際立った特徴があるかについての知識を用いてブートストラップしなければなりません。この例では、そのような "事前" 知識がなくても有効な、映像安定化の方法について説明します。この方法では、代わりにビデオ シーケンス内の "背景面" を自動的に探索し、その観測された歪みを使ってカメラの動きを補正します。
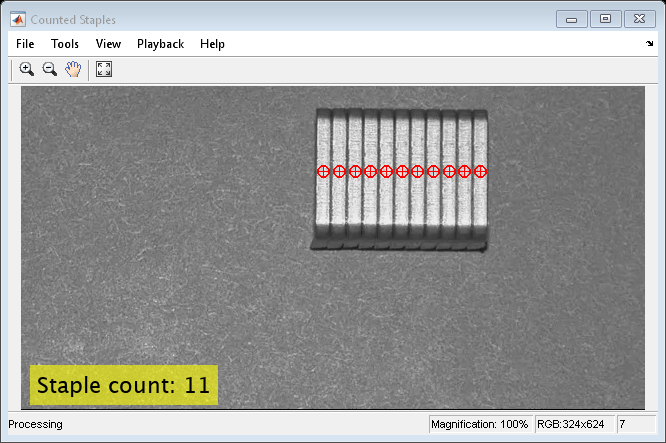
オブジェクトのカウント
この例では、モルフォロジー演算を使用してビデオ ストリーム内のオブジェクトをカウントする方法を説明します。
細胞のカウント
この例では、基本的なモルフォロジー演算子とブロブ解析を組み合わせて使用して、ビデオ ストリームから情報を抽出する方法を説明します。ここでは各ビデオ フレームに含まれる大腸菌の数をカウントします。細胞の明るさが均一でないためにセグメンテーションのタスクが困難になる点に注意してください。