Computer Vision Toolbox 入門
Computer Vision Toolbox™ は、コンピューター ビジョン システムを設計し、テストするためのアルゴリズムとアプリを提供します。外観検査、オブジェクトの検出と追跡、および特徴の検出、抽出、マッチングを実行できます。単一カメラ、魚眼レンズ、ステレオ カメラ、およびマルチカメラ構成のキャリブレーション ワークフローを自動化できます。3 次元ビジョン向けの機能として、ツールボックスでは、ステレオ ビジョン、点群処理、structure from motion、およびリアルタイムでの Visual SLAM と点群 SLAM をサポートします。コンピューター ビジョン アプリを使用すると、自動化を使ってチームベースでグラウンド トゥルースをラベル付けできるだけでなく、カメラのキャリブレーションを行うことができます。
ツールボックスには、事前学習済みの畳み込みニューラル ネットワーク (CNN)、ビジョン トランスフォーマー、視覚言語モデルなど、さまざまな AI 技術が含まれています。イメージ分類、オブジェクト検出、セグメンテーション、姿勢推定、キャプション生成、および光学式文字認識 (OCR) などのタスクには、既製のモデルを使用することも、転移学習によって既製のモデルをさらにカスタマイズすることもできます。
C コード、C++ コード、GPU 実行用コード、およびハードウェア記述言語 (HDL) で書かれたコードを生成できます。
チュートリアル
- カメラ キャリブレーションとは
イメージまたはビデオ カメラのレンズとイメージ センサーのパラメーターを推定します。
- structure from motion とは
2 次元のイメージ シーケンスから 3 次元構造を推定する。
- 深層学習を使用したオブジェクト検出入門
YOLOX、YOLO v4、SSD などの深層学習ニューラル ネットワークを使用してオブジェクト検出を実行する。
- 深層学習を使用したセマンティック セグメンテーション入門
U-Net や DeepLab v3+ などの深層学習ネットワークを使用して、オブジェクトをクラス別にセグメント化する。
- Get Started with Code Generation, Deployment, GPU, and OpenCV Support
C/C++ and GPU code generation and acceleration, HDL code generation, and OpenCV interface for MATLAB and Simulink.
- Computer Vision Toolbox with Simulink
Simulink® support for computer vision applications.
アプリとワークフローに関する意思決定ガイド
- グラウンド トゥルース データにラベルを付けるためのアプリの選択
グラウンド トゥルース データのラベル付けに、次のどのアプリを使用するかを決定します。イメージ ラベラー、ビデオ ラベラー、グラウンド トゥルース ラベラー、LiDAR ラベラー、信号ラベラー、または医用画像ラベラー。
- オブジェクト検出器の選択
YOLOX、YOLO v4、RTMDet、SSD などのオブジェクト検出深層学習モデルの比較。
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Choose a Point Cloud Viewer
Compare visualization functions.
注目の例

深層学習を使用したセマンティック セグメンテーション
この例では、セマンティック セグメンテーション ネットワークを使用してイメージをセグメント化する方法を説明します。

単眼の Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM)。
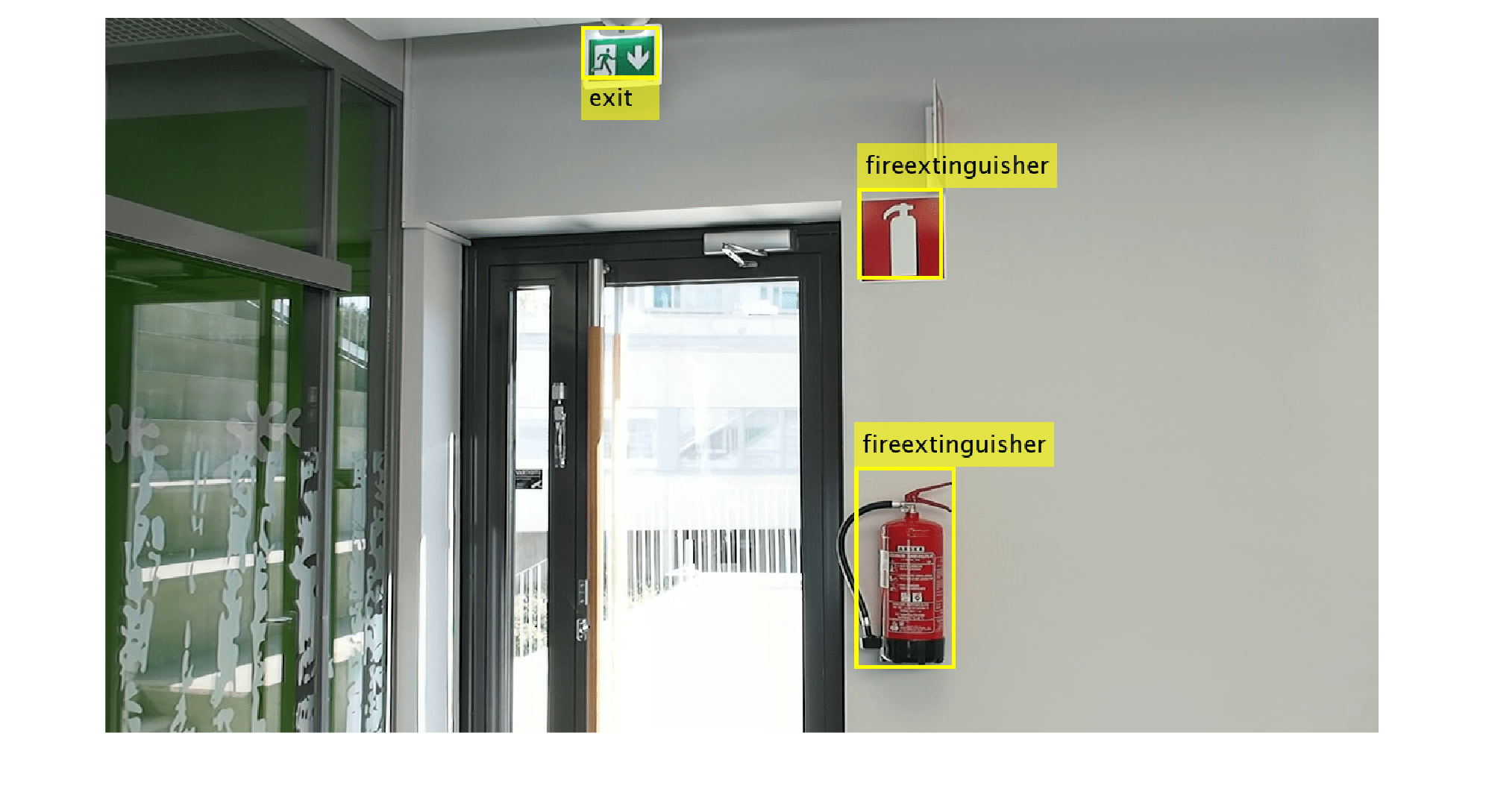
YOLO v2 深層学習を使用したマルチクラス オブジェクト検出
YOLO v2 マルチクラス オブジェクト検出器に学習させ、選択したクラスとオーバーラップしきい値についてオブジェクト検出器のパフォーマンスを評価する。
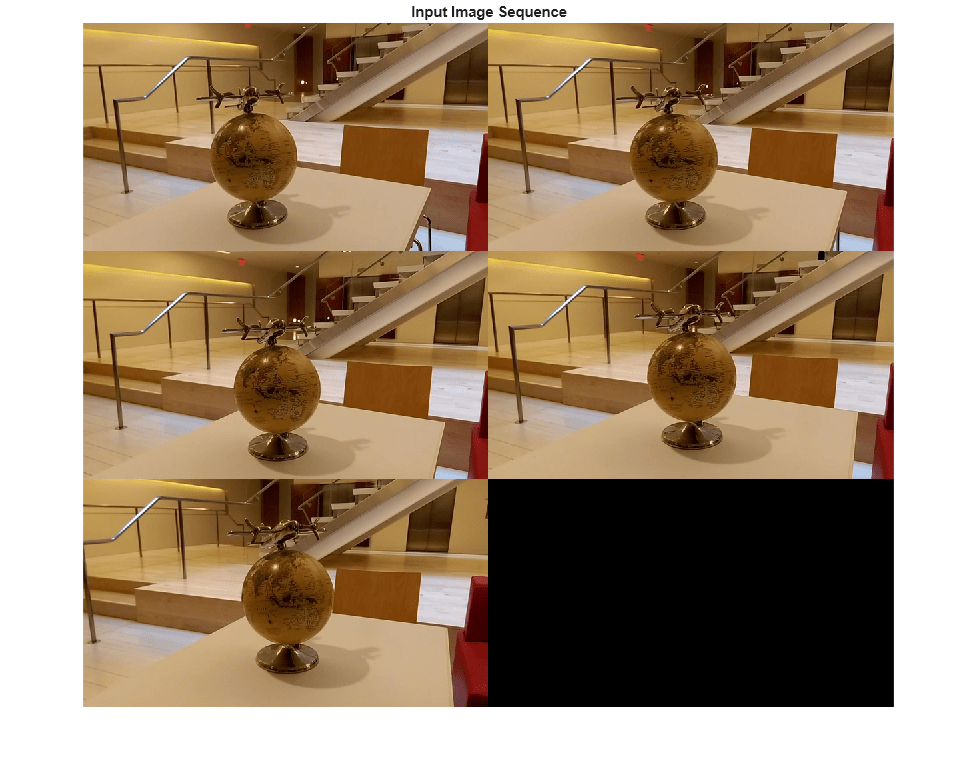
Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion.

3 次元点群のレジストレーションと繋ぎ合わせ
この例では、反復最近接点 (ICP) アルゴリズムにより複数の点群を組み合わせて 3 次元シーンを再構成する方法を説明します。次に、点群で利用可能な色情報を活用してシーンの精度を向上させる方法を示します。

イメージ ポイント機能を使用した要素の多いシーン内のオブジェクトの検出
この例では、オブジェクトの参照イメージがある場合に、要素の多いシーンで特定のオブジェクトを検出する方法を説明します。

キャリブレートされたカメラによる平面オブジェクトの測定
キャリブレートされた単一のカメラを使ってコインの直径をワールド単位で測定する。

イメージの回転とスケーリングの自動検出
この例では、2 つのイメージの間に見られる幾何学的変換を自動的に判定する方法を説明します。具体的には、回転やスケーリングにより 1 つのイメージが別のイメージに対して歪んでいる場合、関数 detectSIFTFeatures および estgeotform2d を使用して回転角度とスケール係数を特定することができます。その後、これらのパラメーターを使用して、歪んだイメージを元の外観に戻すことができます。
動きに基づく複数のオブジェクトの追跡
この例では、静止カメラからのビデオ中で移動するオブジェクトを自動検出し、動きに基づいた追跡を実行する方法を説明します。

パノラマの作成
この例では、複数のイメージを自動的に繋ぎ合わせてパノラマを作成する方法を示します。イメージを繋ぎ合わせる手続きは、特徴ベースのイメージ レジストレーションを拡張したものです。1 組のイメージ ペアのレジストレーションを行う代わりに、複数のイメージ ペアを互いに比較しながらレジストレーションを連続的に行い、パノラマを形成します。
対話形式の学習

コンピューター ビジョン入門
Computer Vision Toolbox を使用してオブジェクトの検出と追跡を行う方法を学ぶ。
ビデオ

コンピューター ビジョンとは
オブジェクト検出、追跡、認識といった多種多様な応用分野において、コンピューター ビジョンがどのように活用できるかを学ぶ。

MATLAB でのカメラ キャリブレーション
カメラ キャリブレーター アプリを使用して、チェッカーボードの検出を自動化し、ピンホール カメラと魚眼カメラのキャリブレーションを行う
授業用リソース

コンピューター ビジョンの基礎
コンピューター ビジョンにおけるイメージ セグメンテーションの基礎を学習する。