estgeotform2d
構文
説明
tform = estgeotform2d(matchedPoints1,matchedPoints2,transformType)matchedPoints1 のインライアを別のイメージのマッチ点 matchedPoints2 のインライアにマッピングすることにより、2 つのイメージ間の 2 次元幾何学的変換を推定します。
[ は、さらに、前の構文の入力引数を使用して、マッチ点のペアをインライアまたはアウトライアとして指定するベクトルを返します。tform,inlierIndex] = estgeotform2d(___)
[ はさらに、関数が変換を推定できたかどうか、また、推定できなかった場合はその理由を示すステータス コードを返します。tform,inlierIndex,status] = estgeotform2d(___)status 出力を指定しない場合、関数は結果を生成できない条件に対してエラーを返します。
[___] = estgeotform2d(___, は、前の構文の引数の任意の組み合わせに加えて、1 つ以上の名前と値の引数を使用して追加のオプションを指定します。たとえば、Name=Value)Confidence=99 は、インライアの最大数を見つけるための信頼度の値を 99 に設定します。
例
イメージを読み取り、それを表示します。
original = imread("cameraman.tif"); imshow(original) title("Original Image")

変換後のイメージを歪めて表示します。
distorted = imresize(original,0.7);
distorted = imrotate(distorted,31);
imshow(distorted)
title("Transformed Image")
元のイメージと変換後のイメージから特徴を検出して抽出します。
ptsOriginal = detectSURFFeatures(original); ptsDistorted = detectSURFFeatures(distorted); [featuresOriginal,validPtsOriginal] = extractFeatures(original,ptsOriginal); [featuresDistorted,validPtsDistorted] = extractFeatures(distorted,ptsDistorted);
イメージ間の特徴をマッチさせて表示します。
index_pairs = matchFeatures(featuresOriginal,featuresDistorted);
matchedPtsOriginal = validPtsOriginal(index_pairs(:,1));
matchedPtsDistorted = validPtsDistorted(index_pairs(:,2));
showMatchedFeatures(original,distorted,matchedPtsOriginal,matchedPtsDistorted)
title("Matched SURF Points With Outliers")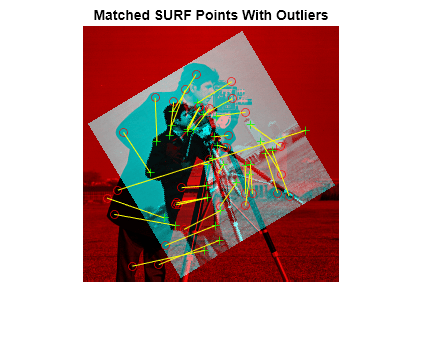
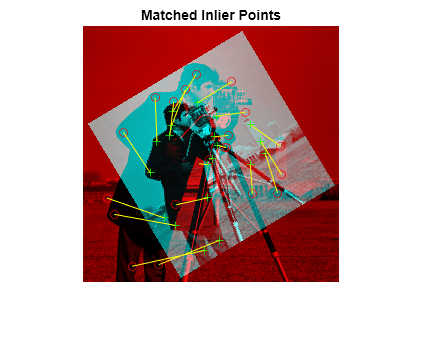
アウトライアを排除して変換行列を推定し、その結果を表示します。
[tform,inlierIdx] = estgeotform2d(matchedPtsDistorted,matchedPtsOriginal,"similarity"); inlierPtsDistorted = matchedPtsDistorted(inlierIdx,:); inlierPtsOriginal = matchedPtsOriginal(inlierIdx,:); showMatchedFeatures(original,distorted,inlierPtsOriginal,inlierPtsDistorted) title("Matched Inlier Points")
推定した変換を使用して、歪めたイメージから元のイメージを復元して表示します。
outputView = imref2d(size(original)); Ir = imwarp(distorted,tform,"OutputView",outputView); imshow(Ir) title("Recovered Image")

入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
例: Confidence=99 は、インライアの最大数を見つけるための信頼度の値を 99 に設定します。
ランダム試行の最大回数。正の整数として指定します。この値は、関数がマッチ点のペアを見つけるために行うランダムな試行の回数を指定します。より高い値を指定すると、関数は追加の計算を実行し、インライアが見つかる可能性が高くなります。
データ型: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
最大数のインライアの検出の信頼度。範囲 (0, 100) 内の正の数値スカラーとして指定します。この値を大きくすると、関数は追加の計算を実行し、より多くのインライアが見つかる可能性が高くなります。
データ型: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
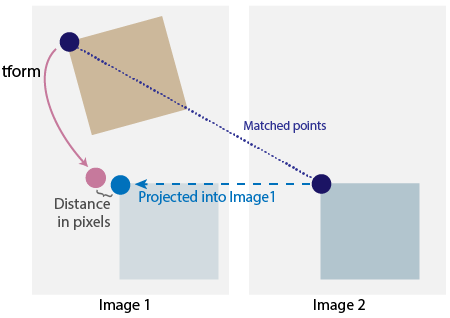
ある点から対応する点の投影までの最大距離。正の数値スカラーとして指定します。MaxDistance は、ある点が対応する点の投影位置と離れていてもインライアと見なされる最大距離をピクセル単位で指定します。対応する投影は、推定された変換に基づきます。
関数は、matchedPoints1 から matchedPoints2 への変換をチェックし、変換を適用した後、各ペアのマッチ点間の距離を計算します。ペア内のマッチ点間の距離が MaxDistance の値よりも大きかった場合、ペアはその変換のアウトライアと見なされます。距離が MaxDistance より小さかった場合、ペアはインライアであると見なされます。
データ型: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
出力引数
アルゴリズム
関数は、M-estimator sample consensus (MSAC) アルゴリズムを使用してアウトライアを排除します。MSAC アルゴリズムは、random sample consensus (RANSAC) アルゴリズムのバリアントです。MSAC アルゴリズムのランダム性のために、すべての実行で結果が同一にならない場合があります。
参照
[1]
[2]