detectMSERFeatures
MSER 特徴の検出
構文
説明
regions = detectMSERFeatures(I)I で検出された MSER 特徴に関する情報が含まれる MSERRegions オブジェクト regions を返します。このオブジェクトは、Maximally Stable Extremal Regions (MSER) アルゴリズムを使用して領域を検出します。
メモ
この関数を使用して Simulink® をサポートするには、モデル コンフィギュレーション設定を有効にしなければなりません。ダイアログ ボックスを表示するには、Simulink エディターで [モデル化] タブを選択し、[モデル設定]、[モデル プロパティ] を選択します。[コンフィギュレーション パラメーター] ダイアログ ボックスで、[シミュレーション ターゲット]、[詳細設定パラメーター]、[MATLAB 関数での動的メモリ割り当て] を選択します。
[___] = detectMSERFeatures( は、1 つ以上の名前と値の引数で指定された追加オプションを設定します。I,Name,Value)
例
イメージを読み取って MSER 領域を検出
I = imread('cameraman.tif');
regions = detectMSERFeatures(I);返された 'regions' オブジェクト内に格納されたピクセル リストによって記述される MSER 領域を可視化します。
figure; imshow(I); hold on; plot(regions,'showPixelList',true,'showEllipses',false);

楕円と重心を領域に合わせて表示します。既定の設定では、プロットに楕円と重心が表示されます。
figure; imshow(I);
hold on;
plot(regions);
MSER 領域を検出します。
I = imread('coins.png');
[regions,mserCC] = detectMSERFeatures(I);検出されたすべての MSER 領域を表示します。
figure imshow(I) hold on plot(regions,'showPixelList',true,'showEllipses',false)

MSER 領域の離心率を測定して領域の真円度を判断します。
stats = regionprops('table',mserCC,'Eccentricity');
円形領域のみを保持するように離心率値をしきい値処理します (円形領域の離心率は低くなります)。
eccentricityIdx = stats.Eccentricity < 0.55; circularRegions = regions(eccentricityIdx);
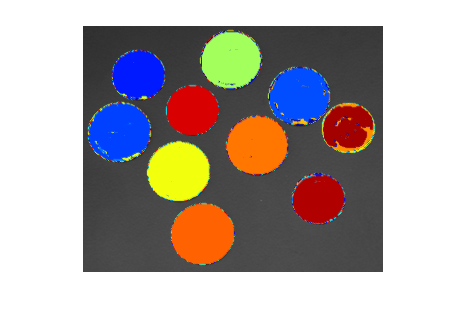
円形領域を表示します。
figure imshow(I) hold on plot(circularRegions,'showPixelList',true,'showEllipses',false)
入力引数
名前と値の引数
出力引数
アルゴリズム
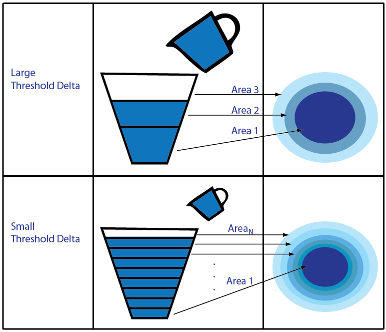
MSER 検出器は、入力イメージの強度範囲をインクリメンタルにステップ実行して、安定領域を検出します。ThresholdDelta パラメーターは、検出器が安定性のテストを行う増分の数を決定します。しきい値のデルタ値は、バケツに水を満たすためのカップのサイズであると考えることができます。カップが小さくなると、バケツをいっぱいにするまでの増分の数が多くなります。バケツは領域の強度プロファイルであると考えることができます。
MSER オブジェクトは、さまざまな強度しきい値による領域サイズの変動をチェックします。安定していると見なされるには、変動が MaxAreaVariation パラメーターの値より小さくなければなりません。
メモ
MSER 特徴検出は、強度値が極端に変化するイメージでの使用には適していません。
強度プロファイルを一連のバケツを表すイメージであると考えることで、MSER を大まかに説明できます。どのバケツも上面と地面が同一平面上になるように配置され、バケツの 1 つにホースが差し込まれていると想像してください。バケツに水が注がれると、水が溢れて、次のバケツに水がたまり始めます。より小さな水の領域が連結してより大きな水域となり、最後には領域全体が水で満たされます。バケツが水で満たされていく過程で、MSER の安定性条件との照合が行われます。さまざまな強度しきい値で領域が表示され、拡大、マージされます。
参照
[1] Nister, D., and H. Stewenius, "Linear Time Maximally Stable Extremal Regions", Lecture Notes in Computer Science. 10th European Conference on Computer Vision, Marseille, France: 2008, no. 5303, pp. 183–196.
[2] Matas, J., O. Chum, M. Urba, and T. Pajdla. "Robust wide baseline stereo from maximally stable extremal regions." Proceedings of British Machine Vision Conference, pages 384-396, 2002.
[3] Obdrzalek D., S. Basovnik, L. Mach, and A. Mikulik. "Detecting Scene Elements Using Maximally Stable Colour Regions," Communications in Computer and Information Science, La Ferte-Bernard, France; 2009, vol. 82 CCIS (2010 12 01), pp 107–115.
[4] Mikolajczyk, K., T. Tuytelaars, C. Schmid, A. Zisserman, T. Kadir, and L. Van Gool, "A Comparison of Affine Region Detectors"; International Journal of Computer Vision, Volume 65, Numbers 1–2 / November, 2005, pp 43–72.
拡張機能
バージョン履歴
R2012a で導入