このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
structure from motion
複数のビューからの 3 次元再構成
structure from motion (SfM) は、一連の 2 次元イメージから 3 次元シーンの構造を推定するプロセスです。詳細については、MATLAB での Visual SLAM の実装を参照してください。
アプリ
| カメラ キャリブレーター | 単一カメラの幾何学的パラメーターの推定 |
| ステレオ カメラ キャリブレーター | ステレオ カメラの幾何学的パラメーターの推定 |
関数
トピック
基礎
- 座標系
ピクセル インデックス、空間座標、および 3 次元座標系の指定。 - 特徴点のタイプ
いくつかの種類の特徴の点オブジェクトを返したり受け入れたりする関数の選択。 - 局所特徴の検出と抽出
局所特徴の検出と抽出の利点と用途の学習。 - structure from motion とは
2 次元のイメージ シーケンスから 3 次元構造を推定する。
カメラ キャリブレーション用アプリ
- 単一カメラ キャリブレーター アプリの使用
カメラのキャリブレーション イメージを準備し、カメラの内部パラメーターを推定する。 - ステレオ カメラ キャリブレーター アプリの使用
ステレオ カメラをキャリブレーションし、イメージから深度を復元するために使用できるようにする。
注目の例

複数のビューからの structure from motion
キャリブレートされたカメラで撮影した 2 次元ビューのシーケンスから、3 次元シーンを再構成する。

2 つのビューからの structure from motion
一連の 2 次元イメージから 3 次元シーンの構造を推定します。
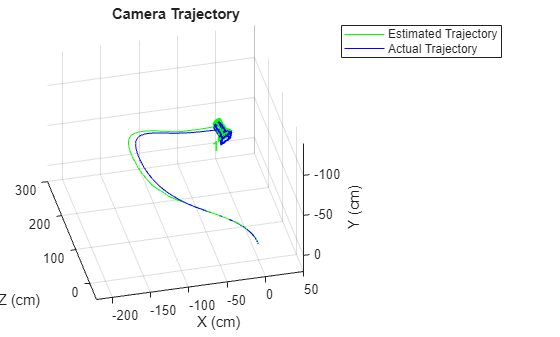
単眼ビジュアル オドメトリ
イメージのシーケンスを解析してカメラの位置と向きを特定する。