pcshow
3 次元点群のプロット
構文
説明
pcshow( は、xyzPoints)xyzPoints 行列によって指定された点を表示します。
pcshow( は、filename)filename で指定されたファイルに保存された点群を表示します。
pcshow(___, は、前の構文にある入力引数の任意の組み合わせに加えて、名前と値の引数を 1 つ以上使用してオプションを指定します。たとえば、Name=Value)ViewPlane="XY" は、点群を可視化する平面を xy 平面として設定します。
ax = pcshow(___)
例
600 行 600 列の面で構成される球体を生成します。
numFaces = 600; [x,y,z] = sphere(numFaces);
既定のカラーマップを使用して球体をプロットします。
figure; pcshow([x(:) y(:) z(:)]) title("Sphere with Default Color Map") xlabel("X") ylabel("Y") zlabel("Z")
テクスチャ マッピングに使用するイメージを読み込み、表示します。
I = im2double(imread("visionteam1.jpg"));
imshow(I)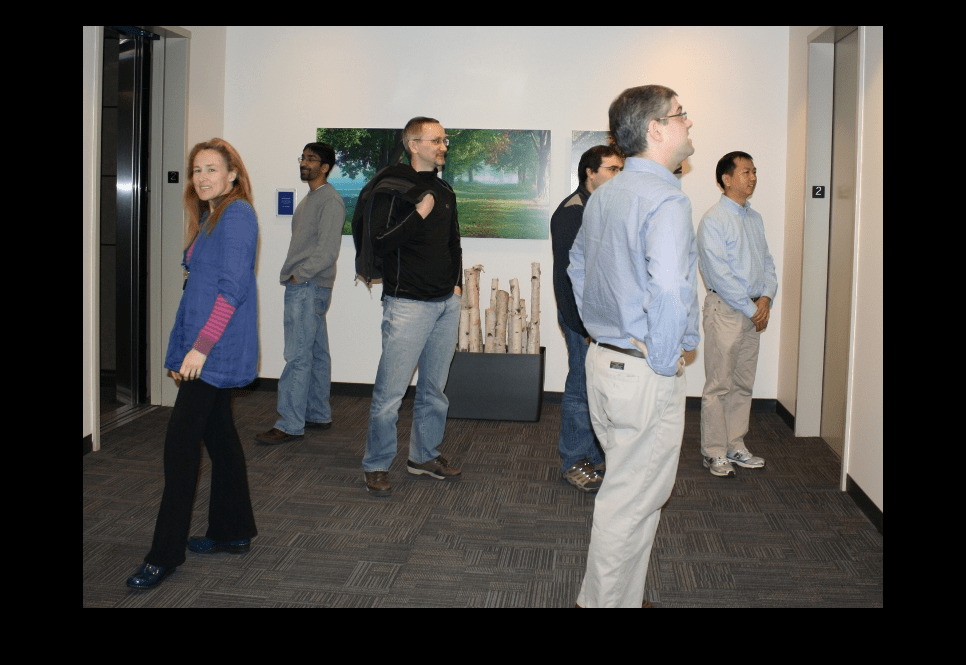
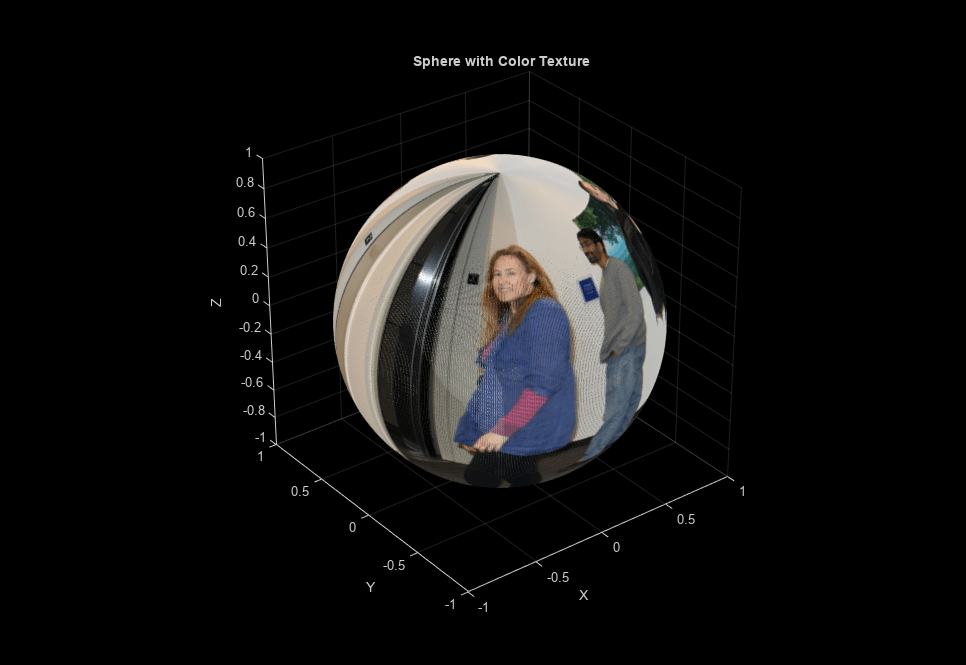
座標をマッピングする準備として、イメージのサイズを変更して反転します。
J = flipud(imresize(I,size(x)));
色のテクスチャとしてイメージを使用して球をプロットします。
pcshow([x(:) y(:) z(:)],reshape(J,[],3)) title("Sphere with Color Texture") xlabel("X") ylabel("Y") zlabel("Z")
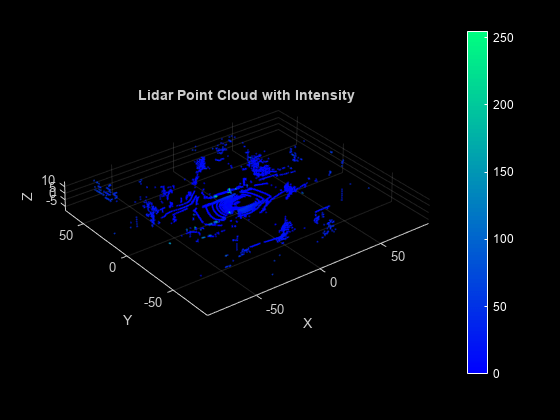
強度データを含むオーガナイズド LiDAR 点群を読み込みます。
ld = load("drivingLidarPoints.mat");点群をプロットし、Figure にラベルを付けます。既定では、強度は jet カラーマップにマッピングされます。
figure pcshow(ld.ptCloud, ColorSource="Intensity") title("Lidar Point Cloud with Intensity") xlabel("X") ylabel("Y") zlabel("Z") colorbar(Color=[1 1 1]) colormap("winter")
入力引数
点群。pointCloud オブジェクトとして指定します。オブジェクトには、点群をレンダリングする位置、強度、および RGB カラーが含まれます。
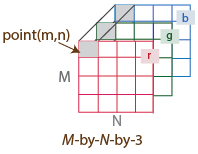
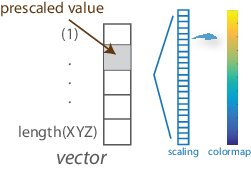
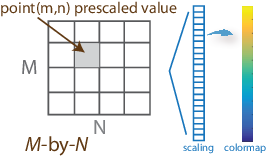
点群の x 位置、y 位置、および z 位置。M 行 3 列の数値行列または M×N×3 の数値配列として指定します。引数 xyzPoints には、M または M×N 個の点が [x,y,z] の形式で含まれます。z 値は、一般的に深度または高度に対応し、各点の色を決定します。入力色を指定しない場合、関数は z の各値を現在のカラーマップの色にマッピングします。
点群内の点の色。RGB 3 成分、M 行 3 列の行列、M×N×3 の配列、色の省略名、色の完全名、色名の配列、または色名の cell 配列として指定します。カラー値の詳細については、カラー値の表を参照してください。
singleデータ型またはdoubleデータ型の場合、colorの各 RGB 値は [0, 1] の範囲内でなければなりません。uint8データ型の場合、colorの各 RGB 値は [0, 255] の範囲内でなければなりません。この関数は、
color値を M 行 3 列の行列または M×N×3 の配列として格納します。色を string または 1 行 3 列のベクトルとして指定した場合、関数は色を次のいずれかの次元に変換します。
| 色 | 形式 | 例 |
|---|---|---|
| すべての点に 1 つの色を指定 | 色の省略名または完全名 |
|
1 行 3 列のベクトル (RGB 3 成分) |
| |
| 点ごとに色を指定 | 文字ベクトルの string 配列 |
|
各行が RGB 3 成分である M 行 3 列の行列 | 255 0 0 255 0 0 0 255 255 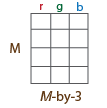 | |
各点の RGB 値を含むオーガナイズド点群の M×N×3 の配列。ここで、M×N は点群のサイズです。 |
|

名前と値の引数
出力引数
詳細
キーボード ショートカットは、回転 (既定) モードでのみ有効になります。座標軸のツール バーの操作を表示するには、Figure をポイントして、以下のオプションのいずれかを選択します。表示をリセットするには、[表示の復元] アイコンをクリックします。

| 機能 | 説明 | ||||||
|---|---|---|---|---|---|---|---|
| 縦軸 | X- 方向、Y- 方向、または Z- 方向を選択して、点群のその軸の方向を正の垂直方向として設定します。選択した方向について、キーボードの矢印キーを使用して、点群を移動します。 | ||||||
| 表示平面 | 点群 Figure の表示角度を XY、YX、XZ、ZX、YZ、または ZY 平面として選択します。 | ||||||
| 背景色 | 背景色を選択できるカラー チャートを表示します。 | ||||||
| 座標軸オン/オフ | 座標軸の表示をオンまたはオフにします。 | ||||||
| 投影 | 透視投影ビューまたは正投影ビューを選択します。 | ||||||
| エクスポート |
| ||||||
| ブラシ | データ ブラシ モードを有効にします。 | ||||||
| データ ヒント | 点群 Figure の点を選択して、その点の点データ値を表示します。データ ヒント表示には、各点の x、y、および z の値が表示されます。深度イメージおよび LiDAR の点群には、次の追加のデータ プロパティが含まれます。
| ||||||
| 3 次元回転 | ドラッグして点群 Figure を回転させます。点群 Figure の任意の点を右クリックし、[点で回転] を選択して、その点を Figure の回転中心に指定することもできます。座標軸の回転に戻るには、もう一度右クリックして [軸の中心で回転] を選択します。 [3 次元回転] モードでは、点群 Figure の任意の場所を右クリックして [色のソース] を選択し、リストからオプションを選択して、点群の色のソースを選択することもできます。Figure は、選択したソースの値に基づいて、アクティブなカラーマップを点群に適用します。位置データのみの点群の場合、[色のソース] オプションは [X]、[Y]、[Z]、および [ユーザー指定] です。深度イメージおよび LiDAR データの点群には、次の追加の色のソース オプションが含まれます。
| ||||||
| パン、ズームイン、およびズームアウト | Figure 内の点群を操作するか、点群 Figure をズームインまたはズームアウトします。 | ||||||
| 表示の復元 | 軸の元のビューを復元します。 |
点群に移動してシーンを観察するには、次のキーボード ショートカットを使用します。
| アクション | キーボード ショートカット | 例 |
|---|---|---|
| シーン内を前後に移動。カメラとターゲットが移動。 | w — 前進 s — 後退 |
|
| シーン内を左右に移動。カメラとターゲットが移動。 | a — 左 d — 右 | |
| シーンを見回す (カメラのピッチ/ヨー回転)。カメラ位置は固定、ターゲットが移動。 | ↑ — カメラのピッチを上げる ↓ — カメラのピッチを下げる ← — カメラのヨーを左に向ける → — カメラのヨーを右に向ける |
|
| シーンのロール (カメラのロール回転)。 | q — カメラを時計回りに動かします。(シーンは反時計回りに動いて見えます。) e — カメラを反時計回りに動かします。(シーンは時計回りに動いて見えます。) |
|
| シーンの回転 (点群を中心にカメラを回転)。カメラ位置が変化、ターゲットは固定。 | Shift + Left または Right — 点群を中心に水平にカメラを旋回移動させます。(カメラがその周りを水平に移動するため、シーンは静止しているように見えます。) Shift + Up または Down — 点群を中心に垂直にカメラを旋回移動させます。(カメラがその周りを垂直に移動するため、シーンは静止しているように見えます。) |
|
| ズームインまたはズームアウト。 | z — ズームイン x — ズームアウト |
|
| 表示平面の確認。 | 1 — XY 2 — YX 3 — XZ 4 — ZX 5 — YZ 6 — ZY 選択した平面に配置されたカメラのプロットの中心に向かう視線。 |
|
| 回転とパンの切り替え。 | Space キー — Space キーを押したままにすると、操作がパンに切り替わります。Space キーを離すと、回転に戻ります。 |
|
| X、Y、および Z 次元で回転。 | T — 3 番目の次元での回転操作を追加します。 |
|



| 色名 | 省略名 | RGB 3 成分 | 外観 |
|---|---|---|---|
"red" | "r" | [1 0 0] |
|
"green" | "g" | [0 1 0] |
|
"blue" | "b" | [0 0 1] |
|
"cyan" | "c" | [0 1 1] |
|
"magenta" | "m" | [1 0 1] |
|
"yellow" | "y" | [1 1 0] |
|
"black" | "k" | [0 0 0] |
|
"white" | "w" | [1 1 1] |
|








バージョン履歴
R2015b で導入参考
オブジェクト
pcviewer|pointCloud|pcplayer|planeModel
関数
showShape|pcshowpair|plot3|pcwrite|pcread|pcmerge|scatter3|reconstructScene|triangulate|pcdownsample|pcfitplane|pcdenoise|pcregistericp