検出されたオブジェクトを可視化する関数の選択
Computer Vision Toolbox™ では、イメージ、ビデオ、および点群データの上に図形を挿入する、または重ね合わせることにより、検出されたオブジェクトを可視化する複数の関数を提供しています。
insert 関連の関数では、イメージとビデオのデータに図形やテキストを融合させて描画します。関数 showShape は、MATLAB® グラフィックスを使用して、イメージ、ビデオ、および点群データの上に図形とテキストを重ね合わせて、MATLAB 座標軸でレンダリングされます。
次の表は、イメージ、ビデオ、および点群データのサポートに基づいて、可視化関数を比較しています。
| 関数 | イメージ | ビデオ | 点群 | コード生成 | 例 |
|---|---|---|---|---|---|
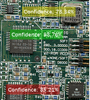
insertShape | あり | あり | なし | あり |
|
insertText | あり | あり | なし | あり |
|
insertObjectAnnotation | あり | あり | なし | あり |
|
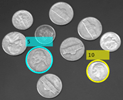
insertMarker | あり | あり | なし | あり |
|
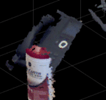
insertObjectMask | あり | あり | なし | あり |
|
insertObjectKeypoints | あり | あり | なし | あり |
|
showShape | あり | あり | あり | なし |
|
cylinderModel のオブジェクト関数 plot | なし | なし | あり | なし |
|
sphereModel のオブジェクト関数 plot | なし | なし | あり | なし |
|
planeModel のオブジェクト関数 plot | なし | なし | あり | なし |
|
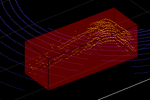
cuboidModel (Lidar Toolbox) オブジェクトのオブジェクト関数 plot (Lidar Toolbox)。 | なし | なし | あり | なし |
点群データへの直方体の当てはめ (Lidar Toolbox) |







参考
オブジェクト
cuboidModel(Lidar Toolbox) |planeModel|sphereModel|cylinderModel|pcplayer|vision.VideoPlayer|vision.DeployableVideoPlayer