cylinderModel
パラメトリック円柱モデル
説明
cylinderModel オブジェクトは、パラメトリック円柱モデルを格納します。
作成
説明
model = cylinderModel(parameters)parameters からパラメトリック円柱モデルを作成します。引数 parameters は、Parameters プロパティの値を決定する 1 行 7 列の数値ベクトルです。
入力引数
プロパティ
オブジェクト関数
plot | パラメトリック モデルのプロット |
findPointsInModel | Find points in or on surface of geometric model |
例
点群を含む MAT ファイルをワークスペースに読み込みます。
load("object3d.mat");点群を表示します。
figure
pcshow(ptCloud)
title("Detect a Cylinder in a Point Cloud")円柱近似用に点から円柱までの最大距離を 5 mm に設定します。
maxDistance = 0.005;
関心領域 (ROI) を指定して、近似関数を制限します。
roi = [0.4 0.6; -inf 0.2; 0.1 inf]; sampleIndices = findPointsInROI(ptCloud,roi);
近似関数の方向の制約を設定します。
referenceVector = [0 0 1];
点群内の指定された ROI で円柱を検出し、抽出します。
model = pcfitcylinder(ptCloud,maxDistance,referenceVector, ...
SampleIndices=sampleIndices);検出された円柱のモデルをプロットします。
hold on
plot(model)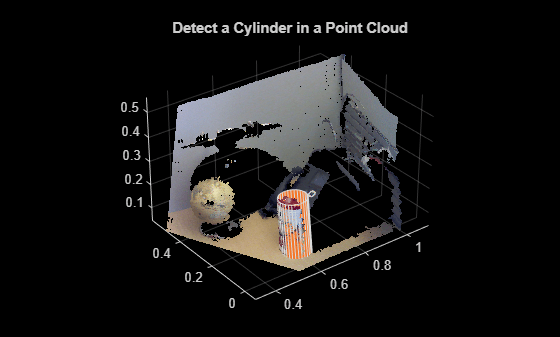
バージョン履歴
R2015b で導入
参考
オブジェクト
関数
pcfitcylinder|pcfitplane|pcfitsphere|pcshow|pcplayer|pcwrite|pcread|pcmerge|pctransform|pcdownsample|pcdenoise|pcregistericp