pcfitcylinder
3 次元点群への円柱の近似
構文
説明
model = pcfitcylinder(ptCloudIn,maxDistance)
model = pcfitcylinder(ptCloudIn,maxDistance,referenceVector)
model = pcfitcylinder(ptCloudIn,maxDistance,referenceVector,maxAngularDistance)
[ は、点群入力のインライア点と外れ値点の線形インデックスを追加で返します。model,inlierIndices,outlierIndices] = pcfitcylinder(___)
[ は、インライア点からモデルまでの距離の平均誤差を追加で返します。model,inlierIndices,outlierIndices,meanError] = pcfitcylinder(___)
[___] = pcfitcylinder(___, は、前の構文にある引数の任意の組み合わせに加えて、名前と値の引数を 1 つ以上使用してオプションを指定します。たとえば、Name=Value)MaxNumTrials=1000 は、ランダム試行の最大回数を 1000 に設定します。
例
点群を読み込みます。
load("object3d.mat");点群を表示します。
figure pcshow(ptCloud) xlabel("X(m)") ylabel("Y(m)") zlabel("Z(m)") title("Original Point Cloud")

円柱近似用に点から円柱までの最大距離 (5 mm) を設定します。
maxDistance = 0.005;
関心領域を設定して探索範囲を制限します。
roi = [0.4 0.6 -Inf 0.2 0.1 Inf]; sampleIndices = findPointsInROI(ptCloud,roi);
方向の制約を設定します。
referenceVector = [0 0 1];
インライア点を指定して、円柱を検出し、点群から抽出します。
[model,inlierIndices] = pcfitcylinder(ptCloud,maxDistance,...
referenceVector,SampleIndices=sampleIndices);
pc = select(ptCloud,inlierIndices);抽出した円柱をプロットします。
figure
pcshow(pc)
title("Cylinder Point Cloud")
点群を含む MAT ファイルをワークスペースに読み込みます。
load("object3d.mat");点群を表示します。
figure
pcshow(ptCloud)
title("Detect a Cylinder in a Point Cloud")円柱近似用に点から円柱までの最大距離を 5 mm に設定します。
maxDistance = 0.005;
関心領域 (ROI) を指定して、近似関数を制限します。
roi = [0.4 0.6; -inf 0.2; 0.1 inf]; sampleIndices = findPointsInROI(ptCloud,roi);
近似関数の方向の制約を設定します。
referenceVector = [0 0 1];
点群内の指定された ROI で円柱を検出し、抽出します。
model = pcfitcylinder(ptCloud,maxDistance,referenceVector, ...
SampleIndices=sampleIndices);検出された円柱のモデルをプロットします。
hold on
plot(model)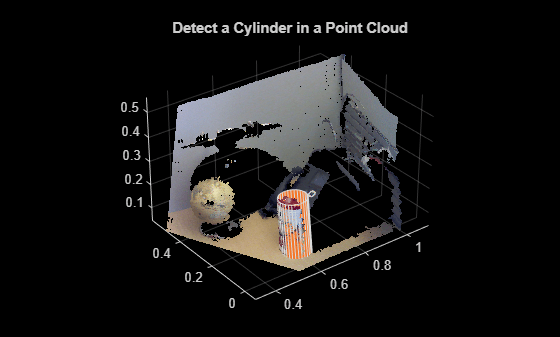
入力引数
名前と値の引数
出力引数
アルゴリズム
この関数は、円柱を表す幾何学的モデルを返します。この関数は、M-estimator SAmple Consensus (MSAC) アルゴリズムを使用して円柱を検出します。MSAC アルゴリズムは、RANdom SAmple Consensus (RANSAC) アルゴリズムのバリアントです。
関数 pcfitcylinder の近似アルゴリズムには、点群の法線が必要です。そのため、入力点群の Normal プロパティが空の場合、関数がそれを指定します。関数が Normal プロパティを指定するとき、6 個の点を使用して局所円柱への近似を行います。6 個の点が機能せず、近似が失敗する場合は、使用する点の数を選択できる関数 pcnormals を呼び出すことを検討します。
参照
[1] Torr, P. H. S., and A. Zisserman. “MLESAC: A New Robust Estimator with Application to Estimating Image Geometry.” Computer Vision and Image Understanding. Volume 78, Issue 1, April 2000, pp. 138-156.
拡張機能
バージョン履歴
R2015b で導入
参考
オブジェクト
関数
pcfitplane|pcfitsphere|findPointsInROI|pcplayer|pcshow|pcwrite|pcread|pcmerge|pctransform|pcregistericp|pcdenoise