pcmerge
3 次元点群のマージ
構文
説明
ptCloudOut = pcmerge(ptCloudA,ptCloudB,gridStep)gridStep は、フィルターの 3 次元ボックスのサイズを指定します。
ptCloudOut = pcmerge(___,GridFilter=gridFilterMethod)
例
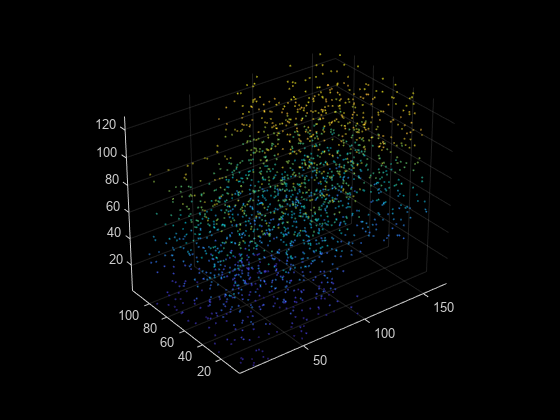
X、Y、Z が [0, 100] の点を持つ点群を作成します。
ptCloudA = pointCloud(100*rand(1000,3));
部分的にオーバーラップする点群を作成します。
ptCloudB = pointCloud([70 20 30] + 100*rand(1000,3));
ボックス フィルターを使用して、2 つの点群をマージします。
ptCloudOut = pcmerge(ptCloudA, ptCloudB, 1); pcshow(ptCloudOut);
入力引数
出力引数
ヒント
2 つの点群に、
ColorやNormalなどの同じプロパティのセットが入力されていない場合、返された点群ではこれらのプロパティがクリアされます。たとえば、ptCloudAに色があり、ptCloudBに色がない場合、ptCloudOutには色が含まれません。関数は、
NaN値またはInf値の点を除外します。
拡張機能
バージョン履歴
R2015a で導入
参考
オブジェクト
pointCloud|planeModel|affine3d|rigid3d
関数
pccat|pcalign|pcplayer|pcshow|pcwrite|pcread|pctransform|pcdownsample|pcfitplane|pcdenoise|pcregistericp