pccat
3 次元点群配列の連結
説明
ptCloudOut = pccat(ptClouds)ptClouds を連結します。ptCloudOut には、連結されたすべての点群の Location、Color、Normal、および Intensity プロパティ値が含まれます。
例
整列された点群のシーケンスを読み取ります。
filePath = fullfile(toolboxdir('vision'),'visiondata','pcdmapseq'); fileDS = fileDatastore(filePath,'ReadFcn',@pcread,'UniformRead',true); ptClouds = readall(fileDS);
複数の点群を単一の点群に連結します。
ptCloudOut = pccat(ptClouds);
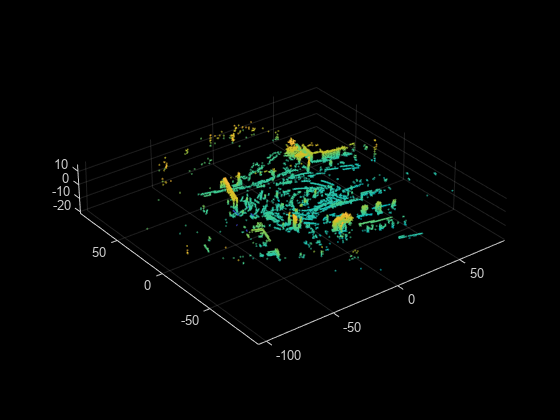
連結された点群を表示します。
pcshow(ptCloudOut)
入力引数
出力引数
ヒント
入力点群のすべてにプロパティの値が割り当てられていない場合、関数は返された点群の当該プロパティの値を割り当てません。たとえば、入力点群の一部に
Colorプロパティの値があるものの、別の点群にはその値がない場合、関数はptCloudOutのColorプロパティの値を返しません。関数は、
NaN値またはInf値の点を除外します。
拡張機能
バージョン履歴
R2020b で導入