pointCloud
3 次元点群を格納するオブジェクト
説明
作成
説明
ptCloud = pointCloud(___,Name=Value)Color=[1 0 0] は、点群の色を赤に設定します。
入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
R2021a より前では、コンマを使用して名前と値をそれぞれ区切り、Name を引用符で囲みます。
例: Color=[1 0 0] は、点群の色を赤に設定します。
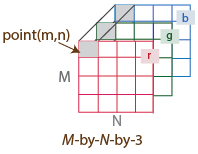
点群の色。カラー文字列、1 行 3 列のベクトル、M 行 3 列の配列、M×N×3 の配列のいずれかからなる RGB 値として指定します。M×N は、点群の次元を指定します。各エントリによって点群データの点の RGB カラーが指定されます。そのため、すべての点に同じ色を指定したり、点ごとに異なる色を指定したりできます。
singleデータ型またはdoubleデータ型の場合、Colorの RGB 値は [0, 1] の範囲で指定しなければなりません。uint8データ型の場合、Colorの RGB 値は [0, 255] の範囲で指定しなければなりません。uint16データ型の場合、Colorの RGB 値は [0, 65535] の範囲で指定しなければなりません。この関数は、
Colorの値を M 行 3 列または M×N×3 として格納します。色を string または 1 行 3 列のベクトルとして指定した場合、関数は色を次のいずれかの次元に変換します。
| 色 | 形式 | 例 |
|---|---|---|
| すべての点に 1 つの色を指定 | string スカラーまたは文字ベクトル |
|
1 行 3 列のベクトル |
| |
| 点ごとに色を指定 | M 行 3 列の行列 (RGB 値のリスト) | 255 0 0 255 0 0 0 255 255 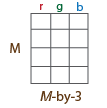 |
各点の RGB 値を含むオーガナイズド点群の M×N×3 の配列。ここで、M×N は点群の次元です。 |
|

データ型: uint8 | uint16 | single | double
表面法線。M 行 3 列または M x N x 3 の配列として指定します。このプロパティを使用して、点群の各点についての法線ベクトルを指定します。表面法線の各エントリによって法線ベクトルの x、y、および z 成分が指定されます。
| 座標 | 表面法線 |
|---|---|
| M 行 3 列の配列 | 各行に、対応する法線ベクトルが含まれる、M 行 3 列の配列。 |
| M x N x 3 の配列 | 各点の 1 x 1 x 3 の法線ベクトルが含まれる M x N x 3 の配列。 |
データ型: single | double
各点でのグレースケール強度。M 行 1 列のベクトルまたは M 行 N 列の行列として指定します。関数によって、各強度値が現在のカラーマップのカラー値にマッピングされます。
| 座標 | 強度 |
|---|---|
| M 行 3 列の配列 | 各行に、対応する強度値が含まれる、M 行 1 列のベクトル。 |
| M x N x 3 の配列 | 各点の強度値が含まれる M 行 N 列の行列。 |
データ型: single | double | uint8 | uint16
出力引数
プロパティ
オブジェクト関数
findNearestNeighbors | 点群内のクエリ点の最近傍を検出する |
findNeighborsInRadius | 点群内のクエリ点に対して特定の半径内にある近傍を検出する |
findPointsInROI | 点群の関心領域内の点を検出 |
findPointsInCylinder | Find points within a cylindrical region in a point cloud |
removeInvalidPoints | 点群から無効な点を削除 |
select | 点群の点を選択 |
copy | Copy array of point cloud objects |
例
3 次元座標点をワークスペースに読み取ります。
load("xyzPoints");入力点座標から点群オブジェクトを作成します。
ptCloud = pointCloud(xyzPoints);
点群オブジェクトのプロパティを調べます。
ptCloud
ptCloud =
pointCloud with properties:
Location: [5184×3 single]
Count: 5184
XLimits: [-3 3.4338]
YLimits: [-2 2]
ZLimits: [0.0016 3.1437]
Color: []
Normal: []
Intensity: []
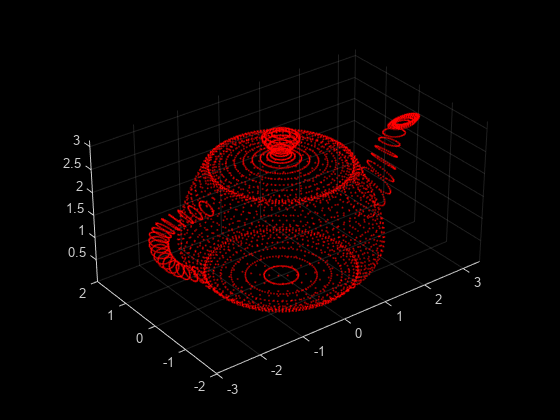
pcshowを使用して点群を表示します。
pcshow(ptCloud)

点群データの色の変更
点群データと同じサイズの RGB カラー配列を作成します。点の色を赤に設定します。
cmatrix = ones(size(ptCloud.Location)).*[1 0 0];
色プロパティを RGB カラー配列に設定した点群オブジェクトを作成します。
ptCloud = pointCloud(xyzPoints,Color=cmatrix); pcshow(ptCloud)
点群データへの表面法線の追加
pcnormalsを使用して、点群データに対応する表面法線を計算します。
normals = pcnormals(ptCloud);
入力点座標から点群オブジェクトを作成します。計算された表面法線を点群オブジェクトに追加します。
ptCloud = pointCloud(xyzPoints,Normal=normals);
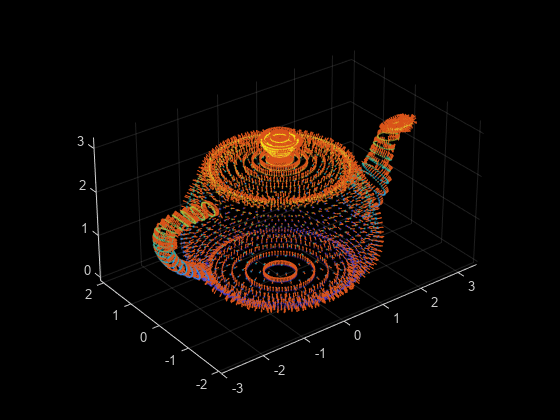
点群を表示して、表面法線をプロットします。
pcshow(ptCloud) x = ptCloud.Location(:,1); y = ptCloud.Location(:,2); z = ptCloud.Location(:,3); u = normals(:,1); v = normals(:,2); w = normals(:,3); hold on quiver3(x,y,z,u,v,w); hold off
ヒント
pointCloud オブジェクトは handle オブジェクトです。点群の個別のコピーを作成する場合には、MATLAB® copy メソッドを使用できます。
ptCloudB = copy(ptCloudA) |
点群関数によって変更可能な点群のコピーを 1 つ保持する場合は、入力と出力に同じ点群変数名を使用します。
ptCloud = pcFunction(ptCloud) |
拡張機能
バージョン履歴
R2015a で導入参考
関数
pccat|pcalign|pcshow|pcwrite|pcread|pcmerge|pcdenoise|pcnormals|pcfromkinect|reconstructScene|pcdownsample|pctransform|pcregistericp