findNearestNeighbors
点群内のクエリ点の最近傍を検出する
構文
説明
[ は、入力点群内の 1 つ以上のクエリ点に対して、k 最近傍法を返します。入力点群は、深度カメラによって生成された、オーガナイズド点群です。クエリ点の k 最近傍法は、高速な近似 k 最近傍探索アルゴリズムを使用して決定されます。indices,dists] = findNearestNeighbors(ptCloud,points,K,camMatrix)
関数はカメラ射影行列 camMatrix を使用して隣接する点の間の関係を把握するため、最近傍探索が高速化されます。ただし、結果の精度は Kd 木ベースのアプローチと比べて劣ります。
メモ
この構文では、RGB-D センサーによって生成された、オーガナイズド点群データのみがサポートされます。
estimateCameraMatrixを使用して、指定された点群データのカメラ射影行列を推定できます。
[ では、前の構文の入力引数に加えて、名前と値の引数を 1 つ以上使用してオプションを指定します。indices,dists] = findNearestNeighbors(___,Name,Value)
例
一連の 3 次元座標点をワークスペースに読み込みます。
load("xyzPoints.mat");点群オブジェクトを作成します。
ptCloud = pointCloud(xyzPoints);
2 つのクエリ点と特定する最近傍の数を指定します。
points = [0 0 0; 0 0 3]; K = 70;
各クエリ点のインデックスと k 最近傍法の距離を取得します。
[indices,dists] = findNearestNeighbors(ptCloud,points,K);
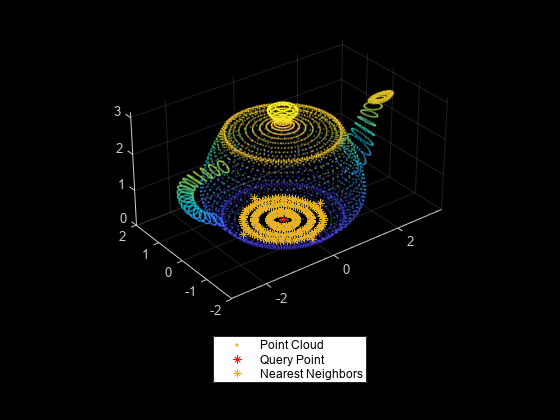
点群を表示します。クエリ点とその最近傍をプロットします。
figure pcshow(ptCloud) hold on plot3(points(:,1),points(:,1),points(:,3),"*r") plot3(ptCloud.Location(indices,1), ... ptCloud.Location(indices,2), ... ptCloud.Location(indices,3),"*m") legend("Point Cloud","Query Points", ... "Nearest Neighbors", ... Location="southoutside", ... Color=[1 1 1]) hold off
カメラ射影行列を使用して、オーガナイズド点群データ内のクエリ点の k 最近傍法を検出します。サンプリングされた点群データの点と対応するイメージ ポイント座標からカメラ射影行列を計算します。
オーガナイズド点群データをワークスペース内に読み込みます。Kinect 深度センサーを使用して点群が生成されます。
ld = load('object3d.mat');
ptCloud = ld.ptCloud;点群データをサンプリングするためのステップ サイズを指定します。
stepSize = 100;
入力点群をサンプリングして、サンプリングされた 3 次元ポイント座標を点群オブジェクトとして格納します。
indices = 1:stepSize:ptCloud.Count; tempPtCloud = select(ptCloud,indices);
サンプリングされた点群から無効な点を削除します。
[tempPtCloud,validIndices] = removeInvalidPoints(tempPtCloud);
入力点群の 3 次元ワールド ポイントの座標を定義します。
worldPoints = tempPtCloud.Location;
入力点群の 3 次元の点の座標に対応する 2 次元イメージ座標を検出します。
[Y,X] = ind2sub([size(ptCloud.Location,1),size(ptCloud.Location,2)],indices); imagePoints = [X(validIndices)' Y(validIndices)'];
このイメージ ポイント座標とワールド ポイント座標からカメラ射影行列を推定します。
camMatrix = estimateCameraMatrix(imagePoints,worldPoints);
クエリ点と特定する近傍の数を指定します。
point = [0.4 0.3 0.2]; K = 1000;
カメラ射影行列を使用して、インデックスと k 最近傍点の距離を検出します。点群の select メソッドを使用して、最近傍の点群データを取得します。
[indices,dists] = findNearestNeighbors(ptCloud,point,K,camMatrix); ptCloudB = select(ptCloud,indices);
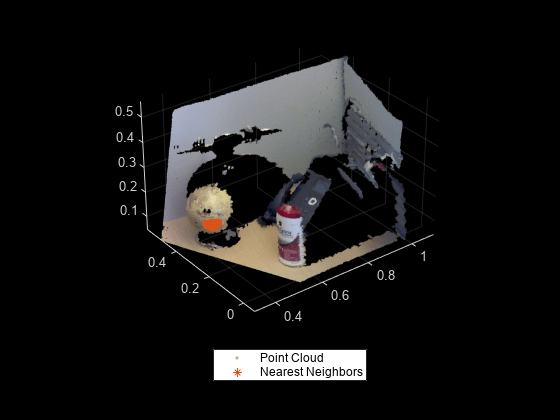
点群とクエリ点の最近傍を表示します。
figure pcshow(ptCloud) hold on plot3(ptCloudB.Location(:,1),ptCloudB.Location(:,2),ptCloudB.Location(:,3),'*') legend('Point Cloud','Nearest Neighbors','Location','southoutside','Color',[1 1 1]) hold off
入力引数
名前と値の引数
出力引数
参照
[1] Muja, M. and David G. Lowe. "Fast Approximate Nearest Neighbors with Automatic Algorithm Configuration". In VISAPP International Conference on Computer Vision Theory and Applications. 2009. pp. 331–340.