cameraIntrinsics
内部カメラ パラメーターを格納するオブジェクト
説明
レンズ歪みなど、カメラの内部キャリブレーション パラメーターに関する情報を格納します。
作成
構文
説明
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize)
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize,PropertyName=Value)RadialDistortion=[0 10] は、半径方向のレンズ歪みプロパティをベクトル [0 10] に設定します。
プロパティ
x と y の焦点距離。ピクセル単位の 2 要素ベクトル [fx fy] として格納されます。
fx = F * sx
fy = F * sy
F はワールド単位 (通常はミリメートル単位) の焦点距離です。sx と sy はそれぞれ x 方向と y 方向におけるワールド単位あたりのピクセル数を表します。したがって、fx と fy はピクセル単位です。
焦点距離 F は画角に影響を与えるため、イメージ内で焦点が合っているように見えるシーンの領域に影響します。被写体の距離が固定されている場合、次のようになります。
焦点距離が短いと画角が広くなり、シーンの広い領域に焦点を合わせてキャプチャできます。被写体とシーンの背景の両方を際立たせます。
焦点距離が長いと画角が狭くなるため、焦点の合うシーンの領域が減ります。被写体がより強調され、キャプチャされる背景の量が制限されます。
cameraIntrinsics オブジェクトを作成した後で FocalLength の値を設定することはできません。
カメラの光学的中心。ピクセル単位の 2 要素ベクトル [cx cy] として格納されます。ベクトルには、カメラの光学的中心の座標が含まれます。
cameraIntrinsics オブジェクトを作成した後で PrincipalPoint の値を設定することはできません。
カメラによって生成されるイメージのサイズ。2 要素ベクトル [mrows ncols] として格納されます。
cameraIntrinsics オブジェクトを作成した後で ImageSize の値を設定することはできません。
半径方向レンズ歪み係数。2 要素、3 要素、または 6 要素のベクトルとして指定します。
2 要素ベクトル — [k1 k2]。
3 要素ベクトル — [k1 k2 k3]。
6 要素ベクトル — [k1 k2 k3 k4 k5 k6]。
Robot Operating System (ROS) において、3 要素ベクトルは "plumb_bob" モデルと呼ばれ、6 要素ベクトルは "rational_polynomial" モデルとして知られています。
半径方向歪みとは、主点から伸びる放射状の線に沿ったイメージ ポイントの変位です。
イメージ ポイントが主点から離れると (半径方向の正の変位)、イメージの倍率が下がり、イメージに糸巻き型歪みが出現する。
イメージ ポイントが主点に向かって移動すると (半径方向の負の変位)、イメージの倍率が上がり、イメージに樽状の歪みが出現する。

このカメラ パラメーター オブジェクトは、(xdistorted, ydistorted) として表される点の半径方向歪み位置を計算します。
| x、y は、光学的中心を原点とするワールド単位の正規化されたイメージ座標における、歪み補正されたイメージ ポイントです。 |
| r2 = x2 + y2 |
| k1、k2、…、k6 はレンズの半径方向歪み係数です。通常、係数は 2 つで十分です。k3、…、k6 は、広角レンズでのみ必要です。 |
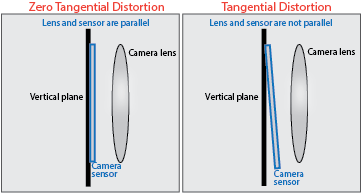
円周方向歪み係数。2 要素ベクトル [p1 p2] として指定します。円周方向の歪みは、レンズとイメージ平面が平行にならない場合に生じます。
カメラ パラメーター オブジェクトは、点の円周方向歪み位置を計算します。歪んだ点は (xdistorted, ydistorted) として次のように表されます。
xdistorted = x + [2 * p1 * x * y + p2 * (r2 + 2 * x2)]
ydistorted = y + [p1 * (r2 + 2*y2) + 2 * p2 * x * y]
| x、y は歪み補正後のピクセル位置 |
| p1 および p2 はレンズの円周方向歪み係数 |
| r2 = x2 + y2 |
カメラの軸のせん断。数値スカラーとして指定します。x 軸と y 軸が厳密に直交する場合、せん断は 0 でなければなりません。
この プロパティ は読み取り専用です。
カメラの内部パラメーターの行列。3 行 3 列の行列として指定します。行列の形式は次のとおりです。
座標 [cx cy] はピクセル単位の光学的中心 (主点) を表します。x 軸と y 軸が厳密に直交する場合、せん断パラメーター s は 0 に等しくなります。
fx = F*sx
fy = F*sy
| F は焦点距離のワールド単位で、通常はミリメートル単位で表されます。 |
| sx と sy は、それぞれ x と y 方向のワールド単位あたりのピクセル数です。 |
| fx と fy はピクセル単位で表されます。 |