単一カメラ キャリブレーター アプリの使用
カメラ キャリブレーターの概要
カメラ キャリブレーター アプリを使用して、カメラの内部パラメーターを推定できます。これらのカメラ パラメーターはさまざまなコンピューター ビジョンの応用に使用できます。これらのアプリケーションには、イメージからレンズ歪みの影響を除去する、平面オブジェクトを測定する、複数カメラからの 3 次元シーンを再構成するなどの用途があります。

次のワークフローを使用してカメラをキャリブレーションし、ベスト プラクティスに従ってキャリブレーション イメージを準備およびキャプチャし、キャリブレーションの精度を評価します。
カメラ キャリブレーター アプリには、カメラ キャリブレーション ワークフローを実装するための一連の関数が組み込まれています。これらの関数は、MATLAB® ワークスペースで直接使用できます。これらの関数のリストについては、カメラのキャリブレーションのトピックを参照してください。
キャリブレーション パターンの選択
カメラ キャリブレーター アプリは、チェッカーボード、サークル グリッド、AprilTag、ChArUco、およびカスタム検出器のパターンをサポートしています。これらの各パターンおよび印刷可能なパターンを含む PDF ファイルの詳細については、Calibration Patternsを参照してください。このアプリは、最大 195 度の視野 (FOV) をもつカメラをキャリブレーションできます。
キャリブレーション イメージのキャプチャ
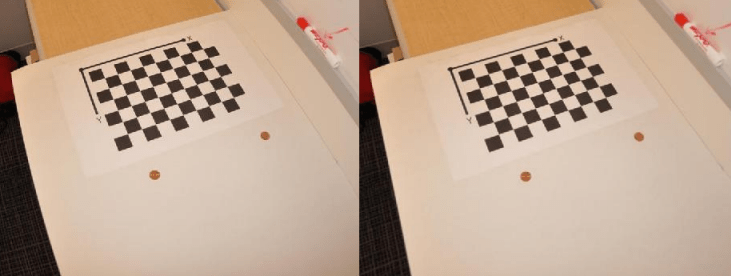
最良のキャリブレーション結果を得るには、10 ~ 20 個のキャリブレーション パターンのイメージを使用します。キャリブレーターには少なくとも 3 個のイメージが必要です。非圧縮のイメージまたは PNG などの可逆圧縮形式を使用します。キャリブレーターが機能するには、キャリブレーション パターンとカメラの設定が一連の要件を満たしていなければなりません。カメラの設定およびイメージのキャプチャの詳細については、カメラの準備とカメラ キャリブレーション用イメージの撮影を参照してください。
カメラ キャリブレーター アプリの使用
アプリを開く
MATLAB ツールストリップ: [アプリ] タブの [イメージ処理とコンピューター ビジョン] セクションで、[カメラ キャリブレーター] アイコンをクリックします。
MATLAB コマンド プロンプト:
cameraCalibratorと入力します。
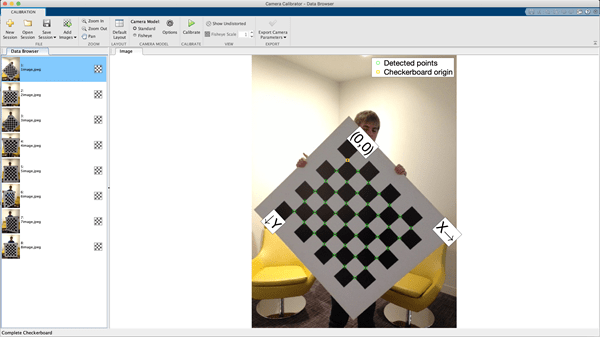
イメージの追加およびカメラ モデルの選択
キャリブレーションを開始するには、イメージを追加しなければなりません。フォルダーから保存済みのイメージを追加したり、カメラから直接イメージを追加したりできます。キャリブレーターはイメージを解析し、イメージがキャリブレーターの要件を満たしていることを確認します。次に、キャリブレーターは選択されたパターンの点を検出します。カメラの設定およびイメージのキャプチャの詳細については、カメラの準備とカメラ キャリブレーション用イメージの撮影を参照してください。
イメージを追加すると、セッションに [イメージとパターンのプロパティ] ダイアログ ボックスが表示されます。キャリブレーターがキャリブレーション パターンを解析する前に、パターン構造を検出しイメージ プロパティを設定できるようにキャリブレーション パターンを選択しなければなりません。このダイアログの詳細については、キャリブレーション パターンの選択とプロパティの設定を参照してください。

キャリブレーション
承認されたイメージが満足のいく状態であれば、[キャリブレーション] タブの [キャリブレーション] を選択します。既定のキャリブレーション設定では、カメラ パラメーターの最小セットを使用します。まず、既定の設定でキャリブレーションを実行します。結果を評価した後、設定を調整するか、イメージを追加または削除してから、再度キャリブレーションを行うことで、キャリブレーションの精度を改善できます。標準カメラ モデルと魚眼カメラ モデルを切り替える場合は、再キャリブレーションしなければなりません。
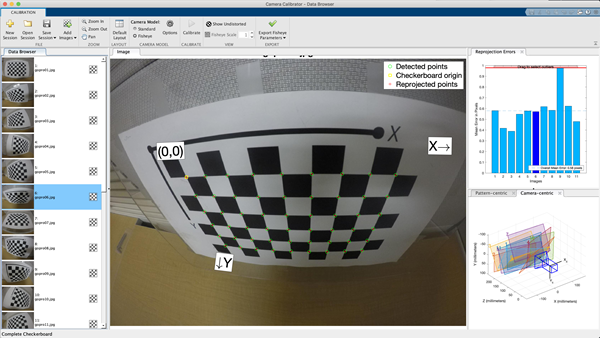
キャリブレーション結果の評価
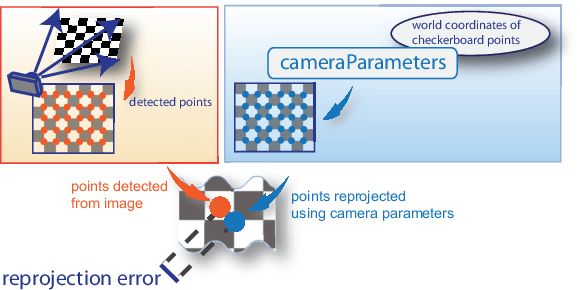
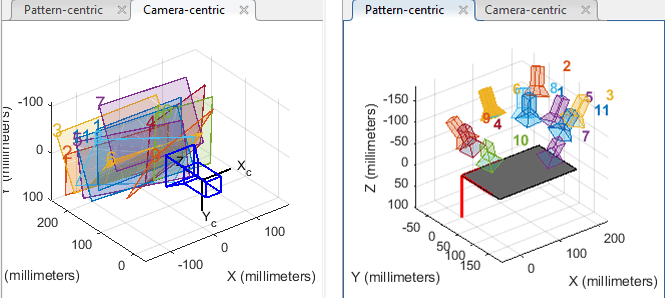
再投影誤差を調べたり、カメラの外部パラメーターを調べたり、歪み補正後のイメージを表示したりすることで、キャリブレーションの精度を評価できます。最良のキャリブレーション結果を得るには、3 つの評価方法すべてを使用します。



キャリブレーションの改善
キャリブレーションを改善するために、誤差の大きいイメージを削除したり、イメージを追加したり、キャリブレーター設定を変更したりできます。
次の場合は、さらにイメージを追加することを検討します。
イメージが 10 個未満。
キャリブレーション パターンが、イメージ フレームを十分にカバーしていない。
カメラに対するキャリブレーション パターンの向きの変化が十分でない。
次のようなイメージの場合は、イメージを削除することを検討します。
平均再投影誤差が大きい。
ぼやけている。
カメラ面に対して 45 度を超える角度のキャリブレーション パターンが含まれている。

キャリブレーション パターンの点が誤って検出されている。


カメラ パラメーターのエクスポート
キャリブレーションの精度に問題がなければ、標準カメラ モデルの場合は [カメラ パラメーターのエクスポート]、魚眼カメラ モデルの場合は [カメラ パラメーターのエクスポート] を選択します。カメラ パラメーターを MATLAB ワークスペース内のオブジェクトにエクスポートするか、カメラ パラメーターを MATLAB スクリプトとして生成することができます。既定値が適切に機能する場合、パラメーターをエクスポートする前に調整する必要はありません。
参照
[1] Zhang, Z. “A Flexible New Technique for Camera Calibration.” IEEE Transactions on Pattern Analysis and Machine Intelligence. 22, no. 11 (November 2000): 1330–34. https://doi.org/10.1109/34.888718.
[2] Heikkila, J., and O. Silven. “A Four-step Camera Calibration Procedure with Implicit Image Correction.” In Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition. 1106–12. San Juan, Puerto Rico: IEEE Comput. Soc, 1997. https://doi.org/10.1109/CVPR.1997.609468.
[3] Scaramuzza, Davide, Agostino Martinelli, and Roland Siegwart. "A Toolbox for Easily Calibrating Omnidirectional Cameras." In Proceedings of IEEE International Workshop on Intelligent Robots and Systems 2006 (IROS 2006), 5695–701. Beijing, China: IEEE, 2006. https://doi.org/10.1109/IROS.2006.282372
[4] Urban, Steffen, Jens Leitloff, and Stefan Hinz. “Improved Wide-Angle, Fisheye and Omnidirectional Camera Calibration.” ISPRS Journal of Photogrammetry and Remote Sensing 108 (October 2015): 72–79. https://doi.org/10.1016/j.isprsjprs.2015.06.005.
参考
アプリ
関数
showReprojectionErrors|showExtrinsics|undistortImage|detectCheckerboardPoints|generateCheckerboardPoints|estimateCameraParameters|detectCharucoBoardPoints|detectAprilGridPoints
オブジェクト
トピック
- カメラの準備とカメラ キャリブレーション用イメージの撮影
- キャリブレーション パターンの選択とプロパティの設定
- 単一カメラのキャリブレーションの精度の評価
- キャリブレートされたカメラによる平面オブジェクトの測定
- カスタム平面キャリブレーション パターンを使用したカメラのキャリブレーション
- 2 つのビューからの structure from motion
- Structure from Motion from Multiple Views
- ステレオ ビデオからの深度推定
- 3 次元点群のレジストレーションと繋ぎ合わせ
- キャリブレーションされていないステレオイメージの平行化
- ステレオ カメラ キャリブレーター アプリの使用
- 座標系
- MATLAB での Visual SLAM の実装
- Camera Calibration with MATLAB