estimateCameraParameters
単一カメラまたはステレオ カメラをキャリブレーションします。
構文
説明
[ は、単一カメラとステレオ カメラの内部パラメーターと外部パラメーター、および歪み係数の推定値を含むオブジェクト cameraParams,imagesUsed,estimationErrors] = estimateCameraParameters(imagePoints,worldPoints)cameraParams を返します。この関数は、カメラ パラメーターの推定に使用されたイメージと、単一カメラのキャリブレーションの標準推定誤差も返します。関数 estimateCameraParameters は、外部パラメーターと内部パラメーターを推定します。
[ は、ステレオ カメラのパラメーターを含む stereoParams,pairsUsed,estimationErrors] = estimateCameraParameters(imagePoints,worldPoints)stereoParameters オブジェクト、stereoParams を返します。この関数は、ステレオ パラメーターの推定に使用されたイメージと、ステレオ カメラのキャリブレーションの標準推定誤差も返します。
cameraParams = estimateCameraParameters(___,Name=Value)WorldUnits="mm" は、ワールド単位をミリメートルに設定します。
例
一連のキャリブレーション イメージを作成します。
imds = imageDatastore(fullfile(toolboxdir("vision"),"visiondata",... "calibration","mono")); imageFileNames = imds.Files;
キャリブレーション パターンを検出します。
[imagePoints,patternDims] = detectCheckerboardPoints(imageFileNames);
四角形のコーナーのワールド座標を生成します。
squareSizeInMM = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSizeInMM);
カメラのキャリブレーションを行います。
I = preview(imds); imageSize = size(I,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
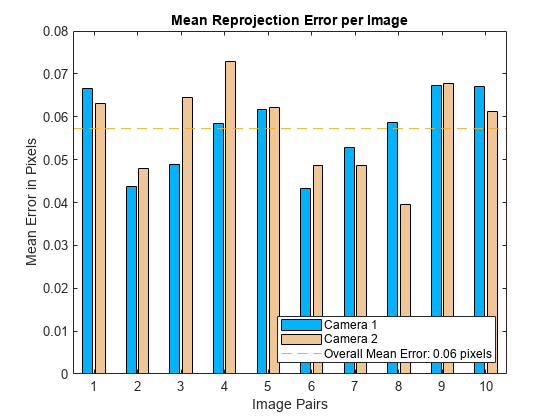
キャリブレーションの精度を可視化します。
showReprojectionErrors(params);

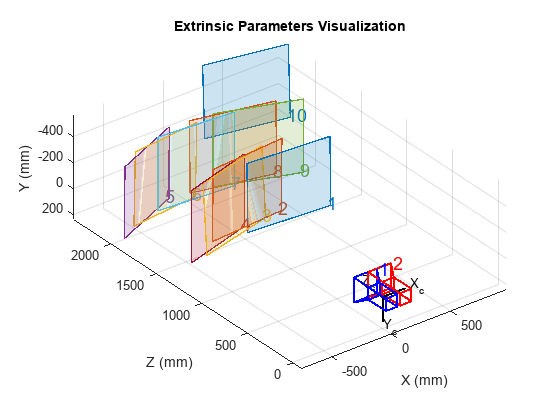
カメラの外部パラメーターを可視化します。
figure; showExtrinsics(params);

drawnow;
検出して再射影された点をプロットします。
figure;
imshow(imageFileNames{1});
hold on;
plot(imagePoints(:,1,1), imagePoints(:,2,1),"go");
plot(params.ReprojectedPoints(:,1,1),params.ReprojectedPoints(:,2,1),"r+");
legend("Detected Points","ReprojectedPoints");
hold off;
キャリブレーション イメージを指定します。
leftImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","left")); rightImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","right"));
チェッカーボードを検出します。
[imagePoints,patternDims] = ...
detectCheckerboardPoints(leftImages.Files,rightImages.Files);チェッカーボード キーポイントのワールド座標を指定します。正方形のサイズはミリメートル単位です。
squareSize = 108; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
ステレオ カメラ システムをキャリブレーションします。両方のカメラの解像度は同じです。
I = readimage(leftImages,1); imageSize = size(I,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
キャリブレーションの精度を可視化します。
showReprojectionErrors(params)
カメラの外部パラメーターを可視化します。
figure showExtrinsics(params)
構造体に変換します。
paramsStruct = toStruct(params)
paramsStruct = struct with fields:
CameraParameters1: [1×1 struct]
CameraParameters2: [1×1 struct]
RotationOfCamera2: [3×3 double]
TranslationOfCamera2: [-119.8720 -0.4005 -0.0258]
Version: [1×1 struct]
RectificationParams: [1×1 struct]
一連のキャリブレーション イメージを作成します。
imds = imageDatastore(fullfile(toolboxdir("vision"),"visiondata",... "calibration","circleGrid","mono")); calibrationImages = readall(imds); calibrationImages = cat(4,calibrationImages{:});
サークル グリッド パターンの次元を定義します。
patternDims = [8 11];
キャリブレーション イメージ内のパターンを検出します。
imagePoints = detectCircleGridPoints(calibrationImages, patternDims,... PatternType="symmetric");
サークル グリッド キーポイントのワールド座標を指定します。中心距離はミリメートル単位です。
centerDistance = 18; % millimeters worldPoints = patternWorldPoints("circle-grid-symmetric",patternDims,centerDistance);
キャリブレーション イメージを使用してカメラのキャリブレーションを行います。
imageSize = size(calibrationImages,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
検出されたパターン グリッドと再投影された点をプロットします。
figure imshow(calibrationImages(:,:,:,1)) hold on plot(imagePoints(:,1,1), imagePoints(:,2,1),"gx",MarkerSize=8) plot(params.ReprojectedPoints(:,1,1),params.ReprojectedPoints(:,2,1),"r+",MarkerSize=8) legend("Detected Points","ReprojectedPoints") hold off

入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
R2021a より前では、コンマを使用して名前と値をそれぞれ区切り、Name を引用符で囲みます。
例: "WorldUnits","mm" は、ワールド ポイントの単位をミリメートルに設定します。
ワールド ポイント単位。文字ベクトルまたは string スカラーとして指定します。
せん断推定。logical スカラーとして指定します。このプロパティを true に設定すると、関数はイメージの座標軸のせん断を推定します。false に設定すると、イメージの座標軸が厳密に直行し、関数はせん断をゼロに設定します。
推定する半径方向歪み係数の数。値 2 または 3 として指定します。
半径方向歪みとは、主点から伸びる放射状の線に沿ったイメージ ポイントの変位です。
イメージ ポイントが主点から離れると (半径方向の正の変位)、イメージの倍率が下がり、イメージに糸巻き型歪みが出現する。
イメージ ポイントが主点に向かって移動すると (半径方向の負の変位)、イメージの倍率が上がり、イメージに樽状の歪みが出現する。

半径方向の歪み係数は、このタイプの歪みをモデル化します。歪んだ点は (xdistorted, ydistorted) として次のように表されます。
xdistorted = x(1 + k1*r2 + k2*r4 + k3*r6)
ydistorted= y(1 + k1*r2 + k2*r4 + k3*r6)
x、y — 歪み補正後のピクセル位置。x と y は正規化されたイメージ座標内にあります。正規化されたイメージ座標は、光学的中心への変換後にピクセル単位の焦点距離で除算したピクセル座標から求められます。したがって、x と y は次元がありません。
k1、k2 および k3 — レンズの半径方向の歪み係数。
r2 = x2 + y2
一般に、キャリブレーションを行うには 2 つの係数で十分です。広角レンズなどの歪みが大きい場合には、3 つの係数を選択して k3 を含めることができます。
円周方向歪みフラグ。logical スカラーとして指定します。このプロパティを true に設定すると、関数は円周方向の歪みを推定します。false に設定すると、円周方向の歪みを無視できます。
円周方向の歪みは、レンズとイメージ平面が平行にならない場合に生じます。円周方向の歪み係数は、このタイプの歪みをモデル化します。
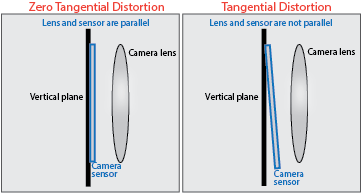
歪んだ点は (xdistorted, ydistorted) として次のように表されます。
xdistorted = x + [2 * p1 * x * y + p2 * (r2 + 2 * x2)]
ydistorted = y + [p1 * (r2 + 2 *y2) + 2 * p2 * x * y]
x、y — 歪み補正後のピクセル位置。x と y は正規化されたイメージ座標内にあります。正規化されたイメージ座標は、光学的中心への変換後にピクセル単位の焦点距離で除算したピクセル座標から求められます。したがって、x と y は次元がありません。
p1 および p2 — レンズの円周方向の歪み係数。
r2 = x2 + y2
出力引数
アルゴリズム
参照
[1]
[2]
[3] Bouguet, J.Y. “Camera Calibration Toolbox for Matlab”, Computational Vision at the California Institute of Technology.
[4] Bradski, G., and A. Kaehler. Learning OpenCV : Computer Vision with the OpenCV Library. Sebastopol, CA: O'Reilly, 2008.
バージョン履歴
R2014b で導入参考
アプリ
オブジェクト
関数
showReprojectionErrors|showExtrinsics|undistortImage|undistortPoints|detectCheckerboardPoints|generateCheckerboardPoints|patternWorldPoints|reconstructScene|rectifyStereoImages|disparityBM|disparitySGM|estimateStereoRectification|estimateFundamentalMatrix|estimateStereoBaseline