stereoParameters
ステレオ カメラ システムのパラメーターを格納するオブジェクト
説明
stereoParameters オブジェクトは、2 つのカメラの内部パラメーターと外部パラメーター、およびそれらの幾何学的な関係を格納します。
作成
ここで説明する関数 stereoParameters を使用して stereoParameters オブジェクトを作成できます。また、入力イメージ ポイントの M×2×numImages×2 の配列 (M は各パターンのキーポイント座標の数) の estimateCameraParameters を使用して stereoParameters オブジェクトを作成することもできます。
構文
説明
stereoParams = stereoParameters( は、2 つのカメラのカメラ パラメーターとカメラ 2 の姿勢を使用して、ステレオ カメラ システム パラメーター オブジェクトを返します。cameraParameters1,cameraParameters2,poseCamera2)cameraParameters1 と cameraParameters2 は、それぞれカメラ 1 とカメラ 2 の内部パラメーターを含む cameraParameters オブジェクトまたは cameraIntrinsics オブジェクトです。3 つの入力引数は、それぞれ CameraParameters1、CameraParameters2、および PoseCamera2 のプロパティを設定します。
stereoParams = stereoParameters( は、paramStruct)paramStruct に格納されているパラメーターを使用して既存の stereoParameters オブジェクトから同一の stereoParameters オブジェクトを作成します。
入力引数
プロパティ
2 つのカメラの内部パラメーターと外部パラメーター
カメラ 1 のパラメーター。cameraParameters オブジェクトとして指定します。オブジェクトには、カメラの内部パラメーター、外部パラメーターおよびレンズ歪みパラメーターが含まれます。
カメラ 2 のパラメーター。cameraParameters オブジェクトとして指定します。オブジェクトには、カメラの内部パラメーター、外部パラメーターおよびレンズ歪みパラメーターが含まれます。
2 つのカメラの幾何学的な関係
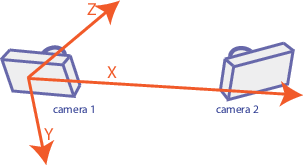
2 番目のカメラの相対姿勢。rigidtform3d オブジェクトとして指定します。オブジェクトの R プロパティと Translation プロパティは、カメラ 1 とカメラ 2 の間の相対的な回転と並進をそれぞれ表します。これらは、以下を使用してカメラ 2 の座標をカメラ 1 の座標に変換し直します。
orientation1 = orientation2 * R location1 = orientation2 * Translation + location2
orientation1 と location1 はカメラ 1 の絶対姿勢を、orientation2 と location2 はカメラ 2 の絶対姿勢を表します。
stereoParameters オブジェクトを作成した後で PoseCamera2 の値を設定することはできません。
基礎行列。3 行 3 列の行列として格納されます。次の方程式が必ず満たされるように、基礎行列は 2 つのステレオ カメラを関連付けます。
イメージ 1 の点 P1 は、イメージ 2 の点 P2 に対応します。どちらの点もピクセル座標で表されます。
基本行列。3 行 3 列の行列として格納されます。次の方程式が必ず満たされるように、基本行列は 2 つのステレオ カメラを関連付けます。
イメージ 1 の点 P1 は、イメージ 2 の点 P2 に対応します。どちらの点も、原点がカメラの光学的中心である正規化されたイメージ座標で表されます。ピクセル座標 x と y は、焦点距離 fx および fy で正規化されています。
推定されたパラメーターの精度
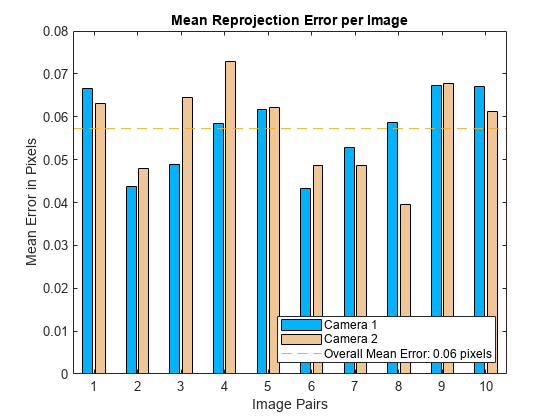
すべてのイメージのペアに対する再投影された点と検出された点の間の平均ユークリッド距離。ピクセル単位で指定します。
カメラ パラメーター推定の設定
2 つのカメラの外部パラメーターを推定するキャリブレーション パターンの数。整数として保存します。
キャリブレーション パターンのキー ポイントのワールド座標。M 行 2 列の配列として指定します。M は、パターン内のキー ポイントの数を表します。
ワールド ポイント単位。文字ベクトルとして指定します。文字ベクトルは、測定単位を示します。
オブジェクト関数
toStruct | Convert a stereo parameters object into a struct |
例
キャリブレーション イメージを指定します。
leftImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","left")); rightImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","right"));
チェッカーボードを検出します。
[imagePoints,patternDims] = ...
detectCheckerboardPoints(leftImages.Files,rightImages.Files);チェッカーボード キーポイントのワールド座標を指定します。正方形のサイズはミリメートル単位です。
squareSize = 108; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
ステレオ カメラ システムをキャリブレーションします。両方のカメラの解像度は同じです。
I = readimage(leftImages,1); imageSize = size(I,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
キャリブレーションの精度を可視化します。
showReprojectionErrors(params)
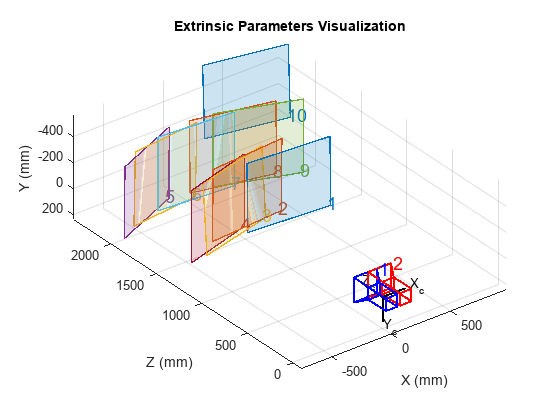
カメラの外部パラメーターを可視化します。
figure showExtrinsics(params)
構造体に変換します。
paramsStruct = toStruct(params)
paramsStruct = struct with fields:
CameraParameters1: [1×1 struct]
CameraParameters2: [1×1 struct]
RotationOfCamera2: [3×3 double]
TranslationOfCamera2: [-119.8720 -0.4005 -0.0258]
Version: [1×1 struct]
RectificationParams: [1×1 struct]
参照
[1] .
[2]