undistortImage
イメージのレンズ歪みの修正
構文
説明
[ は、J,camIntrinsics] = undistortImage(I,intrinsics)intrinsics で定義されたカメラ パラメーターを使用して、入力イメージ I のレンズ歪みを除去します。関数は、補正後のイメージ J と歪み補正後のカメラの内部パラメーター camIntrinsics を返します。
[ は、入力イメージに使用する関数に対して内挿法を指定します。J,camIntrinsics] = undistortImage(I,intrinsics,interp)
[ は、前の構文にある引数の任意の組み合わせに加えて、名前と値の引数を 1 つ以上使用してオプションを指定します。たとえば、J,camIntrinsics] = undistortImage(___,Name=Value)(FillValues=[0 0.4470 0.7410]) は、入力イメージの境界外にある出力ピクセル値を青色に設定します。
例
一連のキャリブレーション イメージを作成します。
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","mono"));
キャリブレーション パターンを検出します。
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files);
四角形のコーナーのワールド座標を生成します。正方形のサイズはミリメートル単位です。
squareSize = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
カメラのキャリブレーションを行います。
I = readimage(images,1); imageSize = size(I,1:2); cameraParams = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
レンズ歪みを除去し、結果を表示します。
I = images.readimage(1); J1 = undistortImage(I,cameraParams);
figure; imshowpair(I,J1,"montage"); title("Original Image (left) vs. Corrected Image (right)");

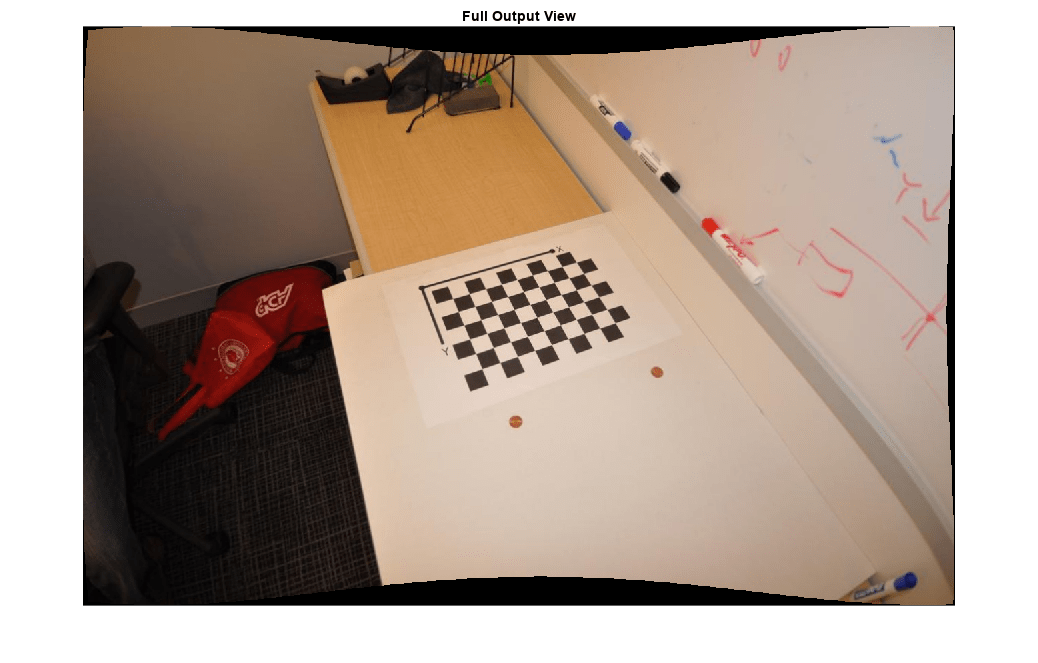
J2 = undistortImage(I,cameraParams,OutputView="full"); figure; imshow(J2); title("Full Output View");
キャリブレーション イメージを含む imageDatastore オブジェクトを作成します。
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","mono")); imageFileNames = images.Files;
キャリブレーション パターンを検出します。
[imagePoints,patternDims] = detectCheckerboardPoints(imageFileNames);
四角形のコーナーのワールド座標を生成します。正方形のサイズはミリメートル単位です。
squareSize = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
カメラのキャリブレーションを行います。
I = readimage(images,10); imageSize = [size(I, 1), size(I, 2)]; params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize); intrinsics = params.Intrinsics;
イメージを読み込み、チェッカーボード点を検出します。
points = detectCheckerboardPoints(I);
点を歪み補正します。
undistortedPoints = undistortPoints(points,intrinsics);
イメージの歪みを補正します。
[J, newIntrinsics] = undistortImage(I,intrinsics,OutputView="full");歪み補正後の点を平行移動します。
newOrigin = intrinsics.PrincipalPoint - newIntrinsics.PrincipalPoint;
undistortedPoints = [undistortedPoints(:,1) - newOrigin(1), ...
undistortedPoints(:,2) - newOrigin(2)];結果を表示します。
figure; imshow(I); hold on; plot(points(:,1),points(:,2),"r*-"); title("Detected Points"); hold off;

figure; imshow(J); hold on; plot(undistortedPoints(:,1),undistortedPoints(:,2),"g*-"); title("Undistorted Points"); hold off;

入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
R2021a より前では、コンマを使用して名前と値をそれぞれ区切り、Name を引用符で囲みます。
例: (FillValues=[0 0.4470 0.7410]) は、入力イメージの境界外にある出力ピクセル値を青色に設定します。
出力ピクセルの塗りつぶしの値。塗りつぶしの値を 1 つ以上含む配列として指定します。入力イメージにおける対応する逆変換後の位置が完全に入力イメージの境界外である場合には、出力ピクセルの塗りつぶしの値を使用します。2 次元グレースケール入力イメージを使用する場合、FillValues をスカラーに設定しなければなりません。トゥルーカラーを使用する場合、FillValues はスカラーまたは RGB 値の 3 要素ベクトルに指定できます。
出力イメージのサイズ。"same"、"full"、または "valid" として指定します。プロパティを "same" に設定すると、関数は出力イメージが入力イメージのサイズにマッチするように設定します。プロパティを "full" に設定すると、出力には入力イメージのすべてのピクセルが含まれます。プロパティを "valid" に設定すると、関数は有効なピクセルのみが含まれるように出力イメージをトリミングします。
入力イメージに対して、次のようになります。

| OutputView | 出力イメージ |
|---|---|
"same" | 入力イメージのサイズをマッチさせます。
|
"full" | 入力イメージのすべてのピクセル。
|
"valid" | 入力イメージの有効なピクセルのみ。
|