カスタム平面キャリブレーション パターンを使用したカメラのキャリブレーション
この例では、カスタム キャリブレーション パターン検出器を作成する方法、およびプログラムとカメラ キャリブレーター アプリの両方を使用してカメラをキャリブレーションする方法を示します。
概要
カメラ キャリブレーター アプリとステレオ カメラ キャリブレーター アプリは、単一カメラとステレオ カメラをキャリブレーションするための次のパターンの使用をネイティブにサポートしています。チェッカーボード、サークル グリッド、ChArUco ボード、AprilGrid。これらのパターンのいずれかを含むキャリブレーション イメージを使用してカメラをキャリブレーションするには、単一カメラ キャリブレーター アプリの使用を参照してください。さらに、これらのアプリでは、アプリでネイティブにサポートされていない平面キャリブレーション パターンのイメージを使用してカメラをキャリブレーションするためのカスタム パターン検出器を追加する機能が提供されています。
この例では、AprilTags で構成されたカスタム キャリブレーション パターンを使用してカメラ キャリブレーション イメージを収集し、readAprilTag関数でキャリブレーション パターン内の AprilTags を検出してその位置を特定する場合について説明します。AprilTags に基づく AprilGrid パターンを使用してキャリブレーションする場合は、detectAprilGrid 関数を使用してプログラムでキャリブレーションするか、単一カメラ キャリブレーター アプリの使用を使用してアプリでキャリブレーションすることができます。
この例では、まず、AprilTags を使用してカスタム キャリブレーション パターンを生成し、カメラのキャリブレーション イメージを収集します。次に、カスタム パターン検出器を実装し、プログラムとカメラ キャリブレーター アプリを使用してカメラをキャリブレーションします。
関数インターフェイスを使用したカメラ キャリブレーション
手順 1: キャリブレーション パターンの生成
タグ イメージのダウンロードと準備
サポートされているすべてのファミリ用に事前に生成されたタグは、Web ブラウザーを使用するか、次のコードを実行することで、こちらからダウンロードできます。
downloadURL = "https://github.com/AprilRobotics/apriltag-imgs/archive/master.zip"; dataFolder = fullfile(tempdir,"apriltag-imgs",filesep); options = weboptions("Timeout", Inf); zipFileName = fullfile(dataFolder,"apriltag-imgs-master.zip"); folderExists = exist(dataFolder,"dir"); % Create a folder in a temporary directory to save the downloaded file. if ~folderExists mkdir(dataFolder); disp("Downloading apriltag-imgs-master.zip (60.1 MB)...") websave(zipFileName,downloadURL,options); % Extract contents of the downloaded file. disp("Extracting apriltag-imgs-master.zip...") unzip(zipFileName,dataFolder); end
Downloading apriltag-imgs-master.zip (60.1 MB)...
Extracting apriltag-imgs-master.zip...
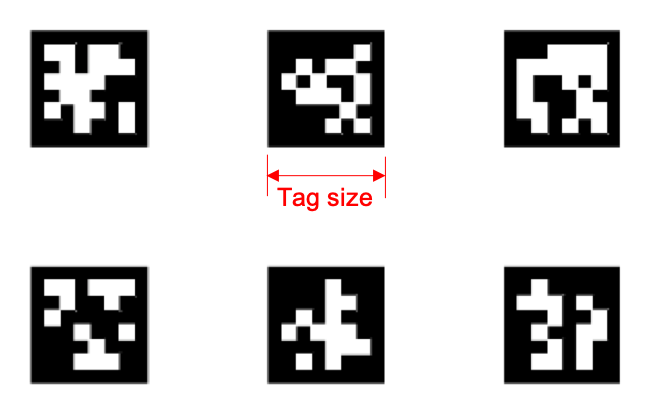
例の最後にある helperGenerateAprilTagPattern 関数を使用すると、タグの配置を指定するタグ イメージを使ってキャリブレーション ターゲットを生成できます。パターン イメージは calibPattern に含まれており、(MATLAB® から) パターンを出力するために使用できます。例では、"tag36h11" ファミリを使用しています。これは、検出能力と偽陽性検出のロバスト性の間の妥当なトレードオフを提供しています。
% Set the properties of the calibration pattern. tagArrangement = [5,8]; tagFamily = "tag36h11"; % Generate the calibration pattern using AprilTags. tagImageFolder = fullfile(dataFolder,"apriltag-imgs-master",tagFamily); imdsTags = imageDatastore(tagImageFolder); calibPattern = helperGenerateAprilTagPattern(imdsTags,tagArrangement,tagFamily);

このパターンで関数readAprilTagを使用すると、個々のタグのコーナーの位置がグループとしてまとめられて検出が行われます。helperAprilTagToCheckerLocations 関数を使用して、この配置をチェッカーボードなどの列優先の配置に変換できます。
% Read and localize the tags in the calibration pattern. [tagIds, tagLocs] = readAprilTag(calibPattern,tagFamily); % Sort the tags based on their ID values. [~, sortIdx] = sort(tagIds); tagLocs = tagLocs(:,:,sortIdx); % Reshape the tag corner locations into an M-by-2 array. tagLocs = reshape(permute(tagLocs,[1,3,2]),[],2); % Convert the AprilTag corner locations to checkerboard corner locations. checkerIdx = helperAprilTagToCheckerLocations(tagArrangement); imagePoints = tagLocs(checkerIdx(:),:); % Display corner locations. figure; imshow(calibPattern); hold on plot(imagePoints(:,1),imagePoints(:,2),"ro-",MarkerSize=15)

キャリブレーション用のイメージの準備
キャリブレーション用のイメージを準備する際の注意点は次のとおりです。
この例では、パターンを紙に印刷しますが、平らで、湿気などによる変形の影響を受けていない面にパターンを印刷するようにします。
キャリブレーション手順ではパターンが平面であると想定しているため、パターンに何らかの欠陥 (たとえば、平らでない表面) があると、キャリブレーションの精度が低下する可能性があります。
キャリブレーション手順では、パターンのイメージが少なくとも 2 つ必要ですが、10 から 20 のイメージを使用すると、より正確な結果が得られます。
パターンがイメージの大部分を占めるようにパターンのさまざまなイメージを撮影し、視野全体がカバーされるようにします。たとえば、レンズ歪みを最大限に得るには、イメージ フレームのすべてのエッジにパターンのイメージを配置します。
パターンが部分的に表示されているイメージは除外されるため、撮影したイメージにパターン全体が表示されていることを確認してください。
キャリブレーション パターンのイメージの準備に関する詳細については、カメラの準備とカメラ キャリブレーション用イメージの撮影を参照してください。

手順 2: AprilTag の検出と位置推定
例の最後に含められている helperDetectAprilTagCorners 関数を使用し、撮影したイメージからタグを検出して位置推定を行い、キャリブレーション手順のキー ポイントとして使用するためにチェッカーボード形式で配置します。
% Create an imageDatastore object to store the captured images. imdsCalib = imageDatastore("aprilTagCalibImages/"); % Detect the calibration pattern from the images. [imagePoints,patternDims] = helperDetectAprilTagCorners(imdsCalib,tagArrangement,tagFamily);
手順 3: キャリブレーション パターンのワールド ポイントの生成
生成された AprilTag パターンは、タグがチェッカーボード形式になっているため、関数generateCheckerboardPointsを使用して、上記 (imagePoints) で決定した対応するイメージ座標におけるワールド座標点を取得できます。
ここでは、正方形のサイズがタグのサイズに置き換えられ、ボードのサイズは前の手順で取得されます。タグの片側で外側の黒いエッジ間のタグ サイズを測定します。
% Generate world point coordinates for the pattern. tagSize = 16; % in millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,tagSize);
手順 4: カメラ パラメーターの推定
イメージとワールド ポイントの対応関係を利用し、関数estimateCameraParametersを使用してカメラ パラメーターを推定します。
% Determine the size of the images. I = readimage(imdsCalib,1); imageSize = size(I,1:2); % Estimate the camera parameters. params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
キャリブレーションの精度と外部カメラ パラメーターを可視化します。撮影したイメージのキャリブレーション パターンの平面を表示します。
% Display the reprojection errors.
figure
showReprojectionErrors(params)
% Display the extrinsics.
figure
showExtrinsics(params)
推定されたカメラ パラメーターを使用して取得した、検出されたイメージ ポイントと再投影された点の位置を検査します。
% Read a calibration image. I = readimage(imdsCalib,10); % Insert markers for the detected and reprojected points. I = insertMarker(I,imagePoints(:,:,10),"o",MarkerColor="g",Size=5); I = insertMarker(I,params.ReprojectedPoints(:,:,10),"x",MarkerColor="r",Size=5); % Display the image. figure imshow(I)

他のキャリブレーション パターンの使用
この例では、キャリブレーション パターンに AprilTag マーカーを使用していますが、同じワークフローを他の平面パターンにも同様に拡張できます。カメラ パラメーターを取得するために使用されるestimateCameraParametersには、次が必要です。
imagePoints: 撮影したイメージから取得されたイメージ座標におけるキャリブレーション パターンのキー ポイント。
worldPoints: キャリブレーション パターンのキー ポイントに対応するワールド ポイントの座標。
これらのキー ポイントを取得する方法があれば、他のキャリブレーション ワークフローは同じままです。
カメラ キャリブレーター アプリへの AprilTag キャリブレーション パターン サポートの統合
利便性を向上させるために、上記のワークフローをカメラ キャリブレーター アプリに統合することもできます。全体的なワークフローは変わらず、手順は次のとおりです。
1.AprilTag を使用してイメージを追加します。
2.AprilTag 用のカスタム パターン検出器クラスをインポートします。検出器は次を行わなければなりません。
AprilTag の検出と位置推定
キャリブレーション パターンのワールド ポイントの生成
3.カメラ パラメーターを推定します。
AprilTag を使用したイメージの追加
カメラ キャリブレーター アプリを開きます。
MATLAB ツールストリップ: [アプリ] タブの [イメージ処理とコンピューター ビジョン] セクションで、[カメラ キャリブレーター] アイコンをクリックします。
MATLAB コマンド プロンプト: 単一カメラ キャリブレーター アプリの使用と入力します。
[キャリブレーション] タブの [ファイル] セクションで、[イメージの追加] をクリックして [From file] を選択します。複数のフォルダーからイメージを追加するには、各フォルダーで [イメージの追加] をクリックします。上記と同じイメージを再利用します。カメラのキャリブレーションには、少なくとも 2 つのイメージが必要です。イメージを追加すると、次の UI が表示されます。
[カスタム パターン] パネルを展開し、その他のオプションを表示します。

カスタム パターン検出器クラスのインポート
上記の UI は、パターン選択のドロップダウン リストを示しています。既定では、アプリに AprilTag 用のパターン検出器は含まれていません。カスタム パターン検出器クラスを作成し、それをリストに追加してアプリで使用できます。カスタム パターンの作成方法の詳細については、情報アイコン (![]() ) をクリックしてください。AprilTag のカスタム パターン検出器クラスは、
) をクリックしてください。AprilTag のカスタム パターン検出器クラスは、MyCustomAprilTagPatternDetector.m ファイルで提供されています。このクラスには、検出器に必要なパラメーターの UI コードと、カスタム AprilTag キャリブレーション パターンを検出および処理するための関数が含まれています。
この例では、関数 configureUIComponents() を使用して UI コンポーネントを構成し、initializePropertyValues() を使用してそれを初期化します。例の最後に含まれている "helperDrawImageAxesLabels" 関数は、カメラ キャリブレーター アプリのダイアログに表示されるキャリブレーション イメージの原点、X 軸、および Y 軸のラベルをレンダリングするために使用されます。
主なキャリブレーション関数は次のとおりです。
detectPatternPoints() - 撮影したイメージから AprilTag を検出して位置を推定し、キャリブレーション手順のキー ポイントとして使用するために並べ替えます。この関数は、例の最後に掲載されている "helperDetectAprilTagCorners" 関数を使用して実装されます。
generateWorldPoints() - AprilTag パターンの対応するイメージ座標のワールド座標を計算します。この関数は、例の最後に掲載されている "helperGenerateAprilTagPattern" 関数を使用して実装されます。
[カスタム パターン] パネルの下の [パターン検出器のインポート] ボタンをクリックして、カスタム パターン検出器クラスをインポートします。クラス ファイル "MyCustomAprilTagPatternDetector.m" を選択します。クラスにエラーがなかった場合、次のビューが表示されます。
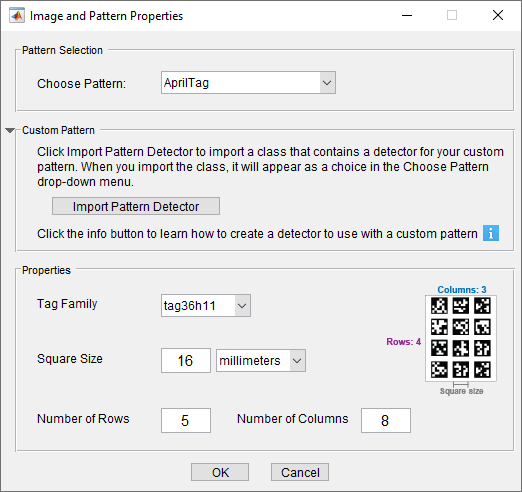
この例では、[プロパティ] パネルのすべてのフィールドに正しい値があります。ただし、これらの値は必要に応じてカスタマイズできます。[Square Size] はタグの幅をワールド単位で表しており、イメージ内の各タグの間隔に等しいことが想定されていることにも注意してください。
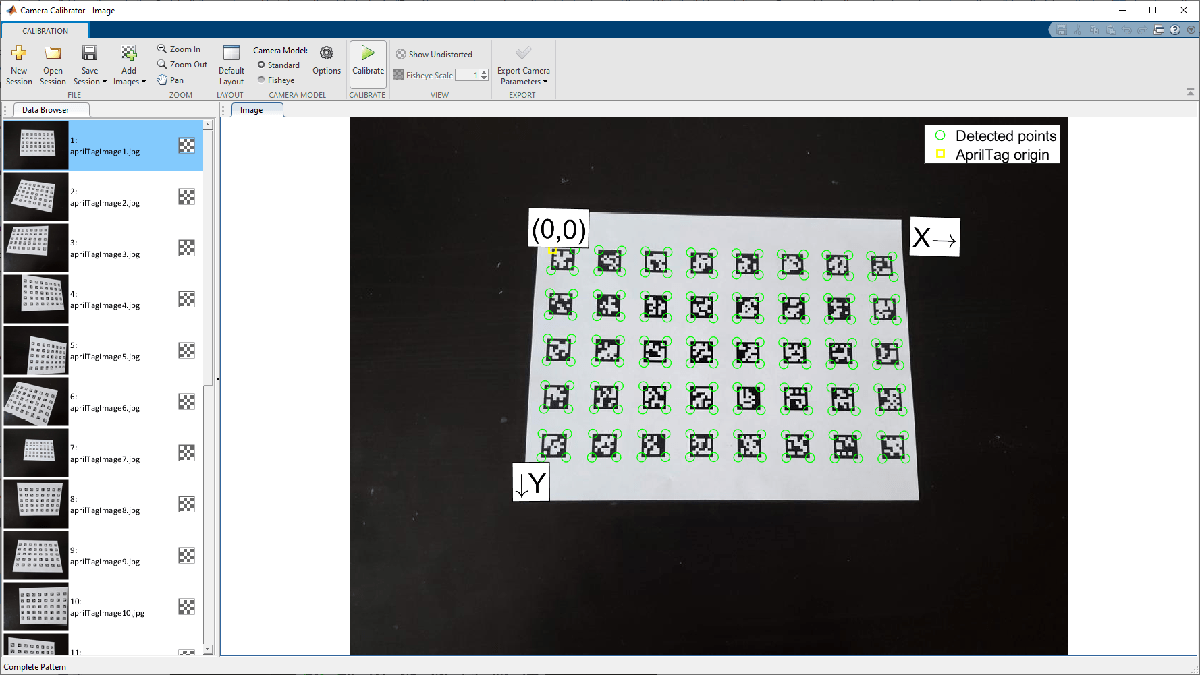
[OK] をクリックすると、以下のように [データ ブラウザー] ペインに ID 付きのイメージのリストが表示されます。
これらのイメージには、検出されたパターンが含まれます。イメージを表示するには、[データ ブラウザー] ペインからイメージを選択します。
カメラ パラメーターの推定
ここでのカメラのキャリブレーション プロセスは、単一カメラ キャリブレーター アプリの使用に掲載されているものと同じです。
既定のキャリブレーション設定で、[キャリブレーション] タブの [キャリブレーション] ボタンをクリックします。[再投影誤差] ペインを検査してキャリブレーションの精度を可視化し、次に [カメラ中心] ペインで、カメラに対して配置されたパターンを示す外部カメラ パラメーターの推定値を可視化します。

サポート関数とサポート クラス
helperGenerateAprilTagPattern は、AprilTag ベースのキャリブレーション パターンを生成します。
function calibPattern = helperGenerateAprilTagPattern(imdsTags,tagArragement,tagFamily) numTags = tagArragement(1)*tagArragement(2); tagIds = zeros(1,numTags); % Read the first image. I = readimage(imdsTags,3); Igray = im2gray(I); % Scale up the thumbnail tag image. Ires = imresize(Igray,15,"nearest"); % Detect the tag ID and location (in image coordinates). [tagIds(1), tagLoc] = readAprilTag(Ires,tagFamily); % Pad image with white boundaries (ensures the tags replace the black % portions of the checkerboard). tagSize = round(max(tagLoc(:,2)) - min(tagLoc(:,2))); padSize = round(tagSize/2 - (size(Ires,2) - tagSize)/2); Ires = padarray(Ires,[padSize,padSize],255); % Initialize tagImages array to hold the scaled tags. tagImages = zeros(size(Ires,1),size(Ires,2),numTags); tagImages(:,:,1) = Ires; for idx = 2:numTags I = readimage(imdsTags,idx + 2); Igray = im2gray(I); Ires = imresize(Igray,15,"nearest"); Ires = padarray(Ires,[padSize,padSize],255); tagIds(idx) = readAprilTag(Ires,tagFamily); % Store the tag images. tagImages(:,:,idx) = Ires; end % Sort the tag images based on their IDs. [~, sortIdx] = sort(tagIds); tagImages = tagImages(:,:,sortIdx); % Reshape the tag images to ensure that they appear in column-major order % (montage function places image in row-major order). columnMajIdx = reshape(1:numTags,tagArragement)'; tagImages = tagImages(:,:,columnMajIdx(:)); % Create the pattern using 'montage'. imgData = montage(tagImages,Size=tagArragement); calibPattern = imgData.CData; end
helperDetectAprilTagCorners は、イメージ内の AprilTag キャリブレーション パターンを検出します。
function [imagePoints,patternDims,imagesUsed] = helperDetectAprilTagCorners(imdsCalib,tagArrangement,tagFamily) % Get the pattern dimensions from tagArrangement. patternDims = tagArrangement*2 + 1; % Initialize number of images and tags. numImages = length(imdsCalib.Files); numTags = tagArrangement(1)*tagArrangement(2); % Initialize number of corners in AprilTag pattern. imagePoints = zeros(numTags*4,2,numImages); imagesUsed = zeros(1,numImages); % Get checkerboard corner indices from AprilTag corners. checkerIdx = helperAprilTagToCheckerLocations(tagArrangement); for idx = 1:numImages % Read and detect AprilTags in image. I = readimage(imdsCalib,idx); [tagIds,tagLocs] = readAprilTag(I,tagFamily); % Accept images if all tags are detected. if numel(tagIds) == numTags % Sort detected tags using ID values. [~,sortIdx] = sort(tagIds); tagLocs = tagLocs(:,:,sortIdx); % Reshape tag corner locations into a M-by-2 array. tagLocs = reshape(permute(tagLocs,[1,3,2]),[],2); % Populate imagePoints using checkerboard corner indices. imagePoints(:,:,idx) = tagLocs(checkerIdx(:),:); imagesUsed(idx) = true; else imagePoints(:,:,idx) = []; end end end
helperAprilTagToCheckerLocations は、AprilTag のコーナーをチェッカーボードのコーナーに変換します。
function checkerIdx = helperAprilTagToCheckerLocations(tagArrangement) numTagRows = tagArrangement(1); numTagCols = tagArrangement(2); numTags = numTagRows * numTagCols; % Row index offsets. rowIdxOffset = [0:numTagRows - 1; 0:numTagRows - 1]; % Row indices for first and second columns in board. col1Idx = repmat([4 1]',numTagRows,1); col2Idx = repmat([3 2]',numTagRows,1); col1Idx = col1Idx + rowIdxOffset(:)*4; col2Idx = col2Idx + rowIdxOffset(:)*4; % Column index offsets colIdxOffset = 0:4*numTagRows:numTags*4 - 1; % Implicit expansion to get all indices in order. checkerIdx = [col1Idx;col2Idx] + colIdxOffset; end
"helperDrawImageAxesLabels" は、キャリブレーター アプリに表示されるキャリブレーション イメージの原点、X 軸、および Y 軸のラベルをレンダリングします。
function [originLabel,xLabel,yLabel] = helperDrawImageAxesLabels(patternDims,imagePoints) numBoardRows = patternDims(1)-1; numBoardCols = patternDims(2)-1; % Reshape checkerboard corners to patternDims shaped array boardCoordsX = reshape(imagePoints(:,1), [numBoardRows,numBoardCols]); boardCoordsY = reshape(imagePoints(:,2), [numBoardRows,numBoardCols]); boardCoords = cat(3, boardCoordsX,boardCoordsY); % Origin label (check if origin location is inside the image) if ~isnan(boardCoordsX(1,1)) p1 = boardCoords(1,1,:); refPointIdx = find(~isnan(boardCoordsX(:,1)),2); p2 = boardCoords(refPointIdx(2),1,:); refPointIdx = find(~isnan(boardCoordsX(1,:)),2); p3 = boardCoords(1,refPointIdx(2),:); [loc, theta] = getAxesLabelPosition(p1,p2,p3); originLabel.Location = loc; originLabel.Orientation = theta; else originLabel = struct; end % X-axis label firstRowIdx = numBoardCols:-1:1; refPointIdx13 = find(~isnan(boardCoordsX(1,firstRowIdx)),2); refPointIdx13 = firstRowIdx(refPointIdx13); p1 = boardCoords(1,refPointIdx13(1),:); p3 = boardCoords(1,refPointIdx13(2),:); refPointIdx2 = find(~isnan(boardCoordsX(:,refPointIdx13(1))),2); p2 = boardCoords(refPointIdx2(2),refPointIdx13(1),:); [loc, theta] = getAxesLabelPosition(p1,p2,p3); theta = 180 + theta; xLabel.Location = loc; xLabel.Orientation = theta; % Y-axis label firstColIdx = numBoardRows:-1:1; refPointIdx12 = find(~isnan(boardCoordsX(firstColIdx,1)),2); refPointIdx12 = firstColIdx(refPointIdx12); p1 = boardCoords(refPointIdx12(1),1,:); p2 = boardCoords(refPointIdx12(2),1,:); refPointIdx3 = find(~isnan(boardCoordsX(refPointIdx12(1),:)), 2); p3 = boardCoords(refPointIdx12(1),refPointIdx3(2),:); [loc,theta] = getAxesLabelPosition(p1,p2,p3); yLabel.Location = loc; yLabel.Orientation = theta; %-------------------------------------------------------------- % p1+v % \ % \ v1 % p1 ------ p2 % | % v2 | % | % p3 function [loc,theta] = getAxesLabelPosition(p1,p2,p3) v1 = p3 - p1; theta = -atan2d(v1(2),v1(1)); v2 = p2 - p1; v = -v1 - v2; d = hypot(v(1),v(2)); minDist = 40; if d < minDist v = (v / d) * minDist; end loc = p1 + v; end %-------------------------------------------------------------- end