readAprilTag
イメージ内の AprilTag の姿勢の検出および推定
構文
説明
[___, は、前の構文の引数の任意の組み合わせに加えて、指定されたカメラの内部パラメーター pose] = readAprilTag(___,intrinsics,tagSize)intrinsics とタグのサイズ tagSize を含むタグの姿勢を返します。
[___, は、認識された AprilTag ファミリ detectedFamily] = readAprilTag(___)detectedFamily を返します。
[___] = readAprilTag(___, は、1 つ以上の名前と値の引数を使用してオプションを指定します。たとえば、Name=Value)GaussianSigma=2 は、2 次元ガウス平滑化カーネルの標準偏差を 2 に設定します。
例
イメージをワークスペースに読み取ります。
I = imread("aprilTagsMulti.jpg");イメージ内で検索する AprilTag 形式を指定します。
tagFamily = ["tag36h11","tagCircle21h7","tagCircle49h12","tagCustom48h12","tagStandard41h12"];
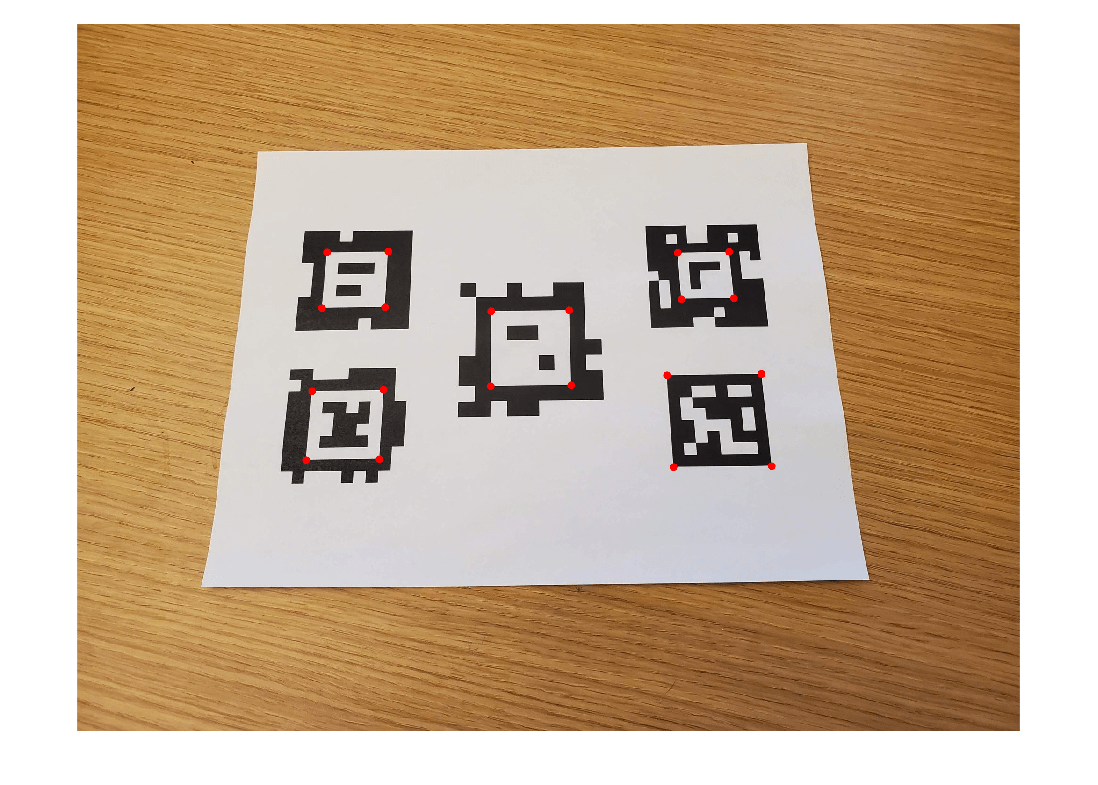
イメージ内のタグとタグの位置を検出し、タグ ID を読み取ります。
[id,loc,detectedFamily] = readAprilTag(I,tagFamily); for idx = 1:length(id) % Display the ID and tag family disp("Detected Tag ID, Family: " + id(idx) + ", " ... + detectedFamily(idx)); % Insert markers to indicate the locations markerRadius = 8; numCorners = size(loc,1); markerPosition = [loc(:,:,idx),repmat(markerRadius,numCorners,1)]; I = insertShape(I,"FilledCircle",markerPosition,ShapeColor="red",Opacity=1); end
Detected Tag ID, Family: 30, tag36h11 Detected Tag ID, Family: 32, tagCircle21h7 Detected Tag ID, Family: 98, tagStandard41h12 Detected Tag ID, Family: 195, tagCustom48h12 Detected Tag ID, Family: 884, tagCircle49h12
検出されたタグのコーナーの位置を示すマーカー付きのイメージを表示します。
imshow(I)
AprilTag を含むイメージをワークスペースに読み取ります。イメージを表示します。
I = imread("aprilTag36h11.jpg");
imshow(I)
カメラの内部パラメーターを読み込みます。
data = load("camIntrinsicsAprilTag.mat");
intrinsics = data.intrinsics; タグのサイズをメートル単位で指定します。
tagSize = 0.04;
カメラの内部パラメーターを使用して入力イメージの歪みを補正します。
I = undistortImage(I,intrinsics,OutputView="same");特定の AprilTag ファミリを検出し、タグの姿勢を推定します。
[id,loc,pose] = readAprilTag(I,"tag36h11",intrinsics,tagSize);座標軸ベクトルとタグ フレームの原点を設定します。
worldPoints = [0 0 0; tagSize/2 0 0; 0 tagSize/2 0; 0 0 tagSize/2];
イメージにタグ フレームと ID を追加します。
for i = 1:length(pose) % Get image coordinates for axes. imagePoints = world2img(worldPoints,pose(i),intrinsics); % Draw colored axes. I = insertShape(I,Line=[imagePoints(1,:) imagePoints(2,:); ... imagePoints(1,:) imagePoints(3,:); imagePoints(1,:) imagePoints(4,:)], ... ShapeColor=["red","green","blue"],LineWidth=7); I = insertText(I,loc(1,:,i),id(i),BoxOpacity=1,FontSize=25); end
注釈付きのイメージを表示します。
imshow(I)

入力引数
名前と値の引数
出力引数
ヒント
リアルタイムのパフォーマンスが要求され、誤検出も最小限に抑える必要があるアプリケーションでは、
"tag36h11"ファミリ タグの使用を検討してください。サポートされている ID の数に対して検出時間の短縮が必要となるアプリケーションでは、
"tagStandard41h12"ファミリ タグを使用します。サポートされているすべてのタグ ファミリの事前生成済みのタグについては、GitHub の事前生成済み AprilTag イメージを参照してください。
readAprilTag関数は、2 つの境界線ビットを含む AprilTag を読み取ることができません。