estworldpose
構文
説明
worldPose = estworldpose(imagePoints,worldPoints,intrinsics)worldPoints は、ワールド座標系で定義しなければなりません。
この関数は、透視 3 点 (P3P) アルゴリズムを使用して透視 n 点 (PnP) 問題を解きます[1]。関数は、M-estimator sample consensus (MSAC) アルゴリズムを使用して、外れ値の誤った対応関係を排除します。インライアは、カメラの姿勢の計算に使用されるイメージ ポイントとワールド ポイントの間の対応関係です。
[ は、前の構文の引数に加え、カメラの姿勢の計算に使用されたインライアのインデックスを返します。worldPose,inlierIdx] = estworldpose(imagePoints,worldPoints,intrinsics)
[ はさらに、点の数が十分であったかどうかを示すステータス コードを返します。worldPose,inlierIdx,status] = estworldpose(imagePoints,worldPoints,intrinsics)
[___] = estworldpose(___, は、前述の構文のいずれかを使用して、1 つ以上の名前と値の引数によって指定された追加オプションを使用します。Name=Value)
例
事前に計算されたワールドとイメージの対応関係を読み込みます。
load("worldToImageCorrespondences.mat");
cameraParams.ImageSize = [128 128];
intrinsics = cameraParams.Intrinsics;ワールド カメラの姿勢を推定します。
worldPose = estworldpose(imagePoints,worldPoints,intrinsics);
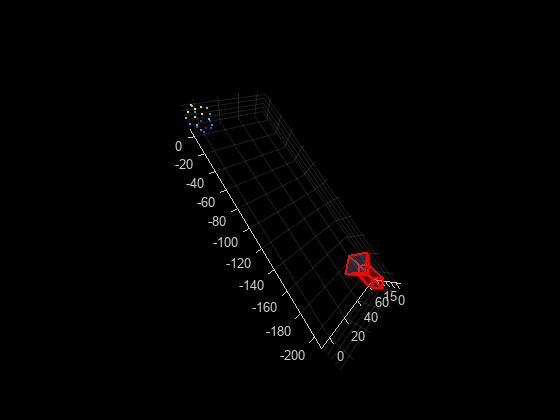
ワールド ポイントをプロットします。
pcshow(worldPoints,VerticalAxis="Y",VerticalAxisDir="down", ... MarkerSize=30); hold on plotCamera(Size=10,Orientation=worldPose.R', ... Location=worldPose.Translation); hold off
入力引数
名前と値の引数
出力引数
ヒント
この関数はレンズ歪みを考慮しません。イメージ ポイントの検出前に関数
undistortImageを使用して、イメージの歪みを補正できます。あるいは、関数undistortPointsを使用してイメージ ポイント自体の歪みを補正できます。
参照
[1] Gao, X.-S., X.-R. Hou, J. Tang, and H.F. Cheng. "Complete Solution Classification for the Perspective-Three-Point Problem." IEEE Transactions on Pattern Analysis and Machine Intelligence. Volume 25,Issue 8, pp. 930–943, August 2003.
[2]