fitgeotform2d
構文
説明
tform = fitgeotform2d(movingPoints,fixedPoints,tformType)tformType の線形幾何学的変換をコントロール ポイントのペア movingPoints および fixedPoints に近似します。コントロール ポイントである fixedPoints と movingPoints は、固定イメージと移動イメージにおける対応する点を表します。当てはめた幾何学的変換 tform は、移動イメージを固定イメージに位置合わせします。
tform = fitgeotform2d(movingPoints,fixedPoints,"polynomial",degree)movingPoints と fixedPoints に当てはめます。
tform = fitgeotform2d(movingPoints,fixedPoints,"pwl")movingPoints および fixedPoints に近似します。この変換は、固定コントロール ポイントの Delaunay 三角形分割を作成し、移動コントロール ポイントを対応する固定コントロール ポイントにマッピングします。局所領域ごとに異なるアフィン変換でコントロール ポイントがマッピングされます。このマッピングはコントロール ポイント間で連続的ですが、連続的に微分可能ではありません。
tform = fitgeotform2d(movingPoints,fixedPoints,"lwm",n)movingPoints および fixedPoints に近似します。局所重み付き平均変換が、近傍のコントロール ポイントを使用して各コントロール ポイントにおける多項式を推定し、マッピングを行います。任意の位置でのマッピングは、これらの多項式の加重平均に依存します。この関数は、n 個の最近傍点を使用して、コントロール ポイントの各組に対し 2 次多項式変換を推定します。
例
チェッカーボードのイメージを作成し、このイメージを回転して、位置のずれたイメージを作成します。
I = checkerboard(40);
J = imrotate(I,30);
imshowpair(I,J,"montage")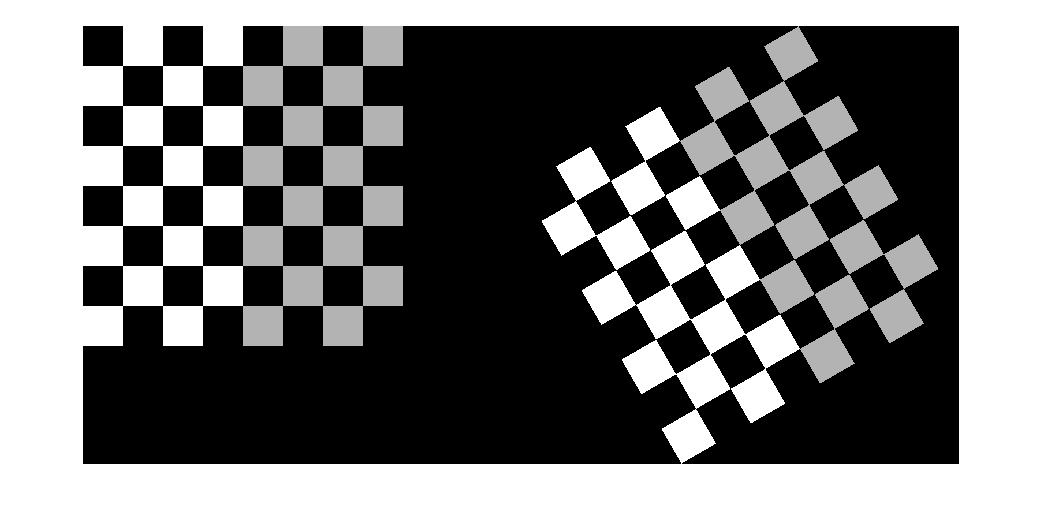
固定イメージ (チェッカーボード) と移動イメージ (回転したチェッカーボード) にいくつかの一致させるコントロール ポイントを定義します。コントロール ポイント選択ツールを使用して対話的にポイントを定義できます。
fixedPoints = [41 41; 281 161]; movingPoints = [56 175; 324 160];
2 個のイメージの位置合わせに使用する相似幾何学的変換を作成します。
tform = fitgeotform2d(movingPoints,fixedPoints,"similarity");tform 推定を使用して、回転したイメージをリサンプルし、固定イメージにレジストレーションします。レジストレーションの誤差は、フォールス カラーのオーバーレイ イメージ内で緑とマゼンタの色領域として表示されます。このエラーの原因は、コントロール ポイントが正確に一致していないためです。
Jregistered = imwarp(J,tform,OutputView=imref2d(size(I))); imshowpair(I,Jregistered)

入力引数
出力引数
詳細
次の表は、fitgeotform2d によってサポートされている変換タイプを複雑度の順にまとめたものです。
変換タイプ | 説明 | コントロール ポイントのペアの最小数 | 例 |
|---|---|---|---|
"similarity" | 移動イメージ内の形状は変更されていないが、平行移動、回転、および等方性スケーリングの組み合わせによってイメージの歪みが生じている場合は、この変換を使用します。直線は直線のまま、平行線は平行のままです。 | 2 |
|
"reflectivesimilarity" | "similarity" にオプションの鏡映が追加されたものと同じです。 | 3 |
|
"affine" | 移動イメージ内の形状がせん断または異方性スケーリングを示す場合は、この変換を使用します。直線は直線のまま、平行線は平行のままですが、四角形は平行四辺形になります。 | 3 |
|
"projective" | シーンが傾いて見える場合は、この変換を使用します。直線は直線のままですが、平行線は消失点に向かって収束します。 | 4 |
|
"polynomial" | イメージ内のオブジェクトが湾曲している場合は、この変換を使用します。多項式の次数が高いほど、近似度も高くなりますが、結果に含まれる曲線の数が固定イメージより多くなる場合があります。 | 6 (2 次) 10 (3 次) 15 (4 次) |
|
"pwl" | イメージの部分ごとに互いに異なる歪みがあるように見える場合は、この変換 (区分的線形) を使用します。 | 4 |
|
"lwm" | 歪みが局所的に変化し、区分的な線形が十分でない場合は、この変換 (局所重み付き平均) を使用します。 | 6 (12 を推奨) |
|







最初の 5 つの変換、"similarity"、"reflectivesimilarity"、"affine"、"projective" および "polynomial" はグローバル変換です。これらの変換では、1 つの数式がイメージ全体に適用されます。最後の 2 つの変換、"pwl" (区分的線形)、"lwm" (局所重み付き平均) は、ローカル変換です。これらの変換では、異なる数式がイメージの中で異なる領域に適用されます。取り扱うイメージに異なる変換がどのような影響を与えるかを調べるときは、まずグローバル変換を試してみてください。これらの変換で十分でない場合は、ローカル変換を試してみてください。まず、区分的線形変換を、次に局所重み付き平均変換を試してみてください。
参照
[1] Goshtasby, Ardeshir. “Piecewise Linear Mapping Functions for Image Registration.” Pattern Recognition 19, no. 6 (January 1986): 459–66. https://doi.org/10.1016/0031-3203(86)90044-0.
[2] Goshtasby, Ardeshir. “Image Registration by Local Approximation Methods.” Image and Vision Computing 6, no. 4 (November 1988): 255–61. https://doi.org/10.1016/0262-8856(88)90016-9.