tf
伝達関数モデル
説明
tf を使用して、実数値または複素数値の伝達関数モデルを作成するか、または動的システム モデルを伝達関数形式に変換します。
伝達関数は線形時不変システムの周波数領域表現です。たとえば、伝達関数 sys(s) = N(s)/D(s) で表される連続時間 SISO 動的システムについて考えます。ここで、s = jw であり、N(s) と D(s) はそれぞれ分子多項式および分母多項式と呼ばれます。tf モデル オブジェクトは SISO または MIMO 伝達関数を連続時間または離散時間で表現できます。
伝達関数モデル オブジェクトを作成するには、その係数を直接指定するか、あるいは (状態空間モデル ss などの) 別のタイプのモデルを伝達関数形式に変換することができます。詳細については、伝達関数を参照してください。
tf を使用して、一般化状態空間 (genss) モデルや不確かさをもつ状態空間 (uss (Robust Control Toolbox)) モデルを作成することもできます。
作成
構文
説明
伝達関数モデルの作成
sys = tf(numerator,denominator)Numerator プロパティと Denominator プロパティを設定して連続時間の伝達関数モデルを作成します。たとえば、伝達関数 sys(s) = N(s)/D(s) で表される連続時間 SISO 動的システムについて考えます。入力引数の numerator と denominator は、それぞれ N(s) と D(s) の係数です。
sys = tf(numerator,denominator,ts)Numerator、Denominator、Ts の各プロパティを設定して離散時間の伝達関数モデルを作成します。たとえば、伝達関数 sys(z) = N(z)/D(z) で表される離散時間 SISO 動的システムについて考えます。入力引数の numerator と denominator は、それぞれ N(z) と D(z) の係数です。サンプル時間を未指定のままにするには、ts 入力引数を -1 に設定します。
sys = tf(numerator,denominator,ltiSys)ltiSys から継承したプロパティをもつ伝達関数モデルを作成します。
sys = tf(___,PropertyName=Value)
伝達関数モデルへの変換
sys = tf(ltiSys,Name=Value)ltiSys の打ち切られた伝達関数表現を取得します。この手法では、入力と出力の各ペアに対して零点を計算するため、入力と出力のサイズが小さいモデルに最適です。 (R2025a 以降)
入力引数
名前と値の引数
出力引数
プロパティ
オブジェクト関数
以下のリストには、tf モデルで使用できる関数の代表的なサブセットが含まれています。一般に、動的システム モデルに適用できる関数はすべて、tf オブジェクトに適用できます。
例
この例では、次の SISO 伝達関数モデルについて考えます。
s の降べきの順に分子係数と分母係数を指定して、伝達関数モデルを作成します。
numerator = 1; denominator = [2,3,4]; sys = tf(numerator,denominator)
sys =
1
---------------
2 s^2 + 3 s + 4
Continuous-time transfer function.
Model Properties
この例では、次の離散時間 SISO 伝達関数モデルについて考えます。
z の降べきの順に分子係数と分母係数を指定し、サンプル時間を 0.1 秒に指定します。離散時間伝達関数モデルを作成します。
numerator = [2,0]; denominator = [4,0,3,-1]; ts = 0.1; sys = tf(numerator,denominator,ts)
sys =
2 z
---------------
4 z^3 + 3 z - 1
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
この例では、既知の固有振動数と減衰比をもつ 2 次システムを表す伝達関数モデルについて考えます。
2 次システムの伝達関数を減衰比 と固有振動数 で表現すると、次のようになります。
減衰比 = 0.25 および固有振動数 = 3 rad/s を仮定して、2 次伝達関数を作成します。
zeta = 0.25; w0 = 3; numerator = w0^2; denominator = [1,2*zeta*w0,w0^2]; sys = tf(numerator,denominator)
sys =
9
---------------
s^2 + 1.5 s + 9
Continuous-time transfer function.
Model Properties
ステップ入力に対するこの伝達関数の応答を調べます。
stepplot(sys)

プロットでは、低減衰比の 2 次システムで予想されるリングダウンが示されています。
離散時間、多入力、多出力のモデルの伝達関数を作成します。
サンプル時間は ts = 0.2 秒です。
分母係数を 2 行 2 列の行列として指定します。
numerators = {1 [1 0];[-1 2] 3};共通分母の係数を行ベクトルとして指定します。
denominator = [1 0.3];
離散時間 MIMO 伝達関数モデルを作成します。
ts = 0.2; sys = tf(numerators,denominator,ts)
sys =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
MIMO 伝達関数の作成の詳細については、MIMO 伝達関数を参照してください。
この例では、SISO 伝達関数モデルを連結して MIMO 伝達関数モデルを作成します。次の単入力 2 出力の伝達関数について考えます。
SISO 要素を連結して MIMO 伝達関数モデルを指定します。
sys1 = tf([1 -1],[1 1]); sys2 = tf([1 2],[1 4 5]); sys = [sys1;sys2]
sys =
From input to output...
s - 1
1: -----
s + 1
s + 2
2: -------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
MIMO 伝達関数の作成の詳細については、MIMO 伝達関数を参照してください。
この例では、有理式を使用して連続時間の伝達関数モデルを作成します。有理式を使用すると、分子と分母の多項式係数を指定するよりも簡単でより直観的になる場合があります。
以下のシステムを考えます。
伝達関数モデルを作成するには、まず s を tf オブジェクトとして指定します。
s = tf('s')s = s Continuous-time transfer function. Model Properties
有理式で s を使用して伝達関数モデルを作成します。
sys = s/(s^2 + 2*s + 10)
sys =
s
--------------
s^2 + 2 s + 10
Continuous-time transfer function.
Model Properties
この例では、有理式を使用して離散時間の伝達関数モデルを作成します。有理式を使用すると、多項式係数を指定するよりも簡単でより直観的になる場合があります。
以下のシステムを考えます。
伝達関数モデルを作成するには、まず z を tf オブジェクトとして指定し、サンプル時間 Ts を指定します。
ts = 0.1;
z = tf('z',ts)z = z Sample time: 0.1 seconds Discrete-time transfer function. Model Properties
有理式で z を使用して伝達関数モデルを作成します。
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
z - 1
------------------
z^2 - 1.85 z + 0.9
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
この例では、別の伝達関数モデルから継承されたプロパティをもつ伝達関数モデルを作成します。次の 2 つの伝達関数について考えます。
この例では、TimeUnit プロパティと InputDelay プロパティを 'minutes' に設定して sys1 を作成します。
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
sys1 から継承されたプロパティをもつ 2 つ目の伝達関数モデルを作成します。
numerator2 = [1,-1]; denominator2 = [7,2,0,0,9]; sys2 = tf(numerator2,denominator2,sys1)
sys2 =
s - 1
-----------------
7 s^4 + 2 s^3 + 9
Continuous-time transfer function.
Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
伝達関数モデル sys2 が sys1 と同じプロパティをもつことを確認してください。
for ループを使用して伝達関数モデルの配列を指定できます。
まず、伝達関数配列にゼロを事前に割り当てます。
sys = tf(zeros(1,1,3));
最初の 2 つのインデックスはモデルの出力と入力の数を表し、3 つ目のインデックスは配列内のモデルの数を表します。
for ループで有理式を使用して伝達関数モデルの配列を作成します。
s = tf('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-----------
s^2 + s + 1
sys(:,:,2,1) =
2
-----------
s^2 + s + 2
sys(:,:,3,1) =
3
-----------
s^2 + s + 3
3x1 array of continuous-time transfer functions.
Model Properties
この例では、次の状態空間モデルの伝達関数を計算します。
状態空間行列を使用して状態空間モデルを作成します。
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
状態空間モデル ltiSys を伝達関数に変換します。
sys = tf(ltiSys)
sys =
From input 1 to output:
s
-------------
s^2 + 4 s + 5
From input 2 to output:
s^2 + 5 s + 8
-------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
この例では、同定された多項式モデルの測定成分とノイズ成分を 2 つの別々の伝達関数に抽出します。
identifiedModel.mat の Box-Jenkins 多項式モデル ltiSys を読み込みます。
load('identifiedModel.mat','ltiSys');
ltiSys は同定された 形式の離散時間モデルで、 は測定成分、 はノイズ成分を表します。
測定成分とノイズ成分を伝達関数として抽出します。
sysMeas = tf(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.1426 z^-1 + 0.1958 z^-2
z^(-2) * ----------------------------
1 - 1.575 z^-1 + 0.6115 z^-2
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
sysNoise = tf(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.04556 + 0.03301 z^-1
----------------------------------------
1 - 1.026 z^-1 + 0.26 z^-2 - 0.1949 z^-3
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
測定成分はプラント モデルとすることができ、ノイズ成分は制御システム設計の外乱モデルとして使用できます。
伝達関数モデル オブジェクトには、モデルが何を表しているかを見失わないために役立つモデル データが含まれています。たとえば、モデルの入力と出力に名前を割り当てることができます。
次の連続時間 MIMO 伝達関数モデルについて考えます。
モデルには 1 つの入力 電流と、2 つの出力 トルクと角速度があります。
まず、モデルの分子係数と分母係数を指定します。
numerators = {[1 1] ; 1};
denominators = {[1 2 2] ; [1 0]};入力名と出力名を指定して、伝達関数モデルを作成します。
sys = tf(numerators,denominators,'InputName','Current',... 'OutputName',{'Torque' 'Angular Velocity'})
sys =
From input "Current" to output...
s + 1
Torque: -------------
s^2 + 2 s + 2
1
Angular Velocity: -
s
Continuous-time transfer function.
Model Properties
この例では、'Variable' プロパティを使用して離散時間伝達関数モデルの多項式の順序付けを指定します。
サンプル時間が 0.1 秒の、次の離散時間伝達関数について考えます。
z 係数を指定して最初の離散時間伝達関数を作成します。
numerator = [1,0,0]; denominator = [1,2,3]; ts = 0.1; sys1 = tf(numerator,denominator,ts)
sys1 =
z^2
-------------
z^2 + 2 z + 3
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
sys1 の係数は z の降べきの順に並べられます。
tf は 'Variable' プロパティの値に基づいて表記を切り替えます。sys2 は sys1 の逆伝達関数モデルであるため、'Variable' を 'z^-1' に指定して同じ分子係数と分母係数を使用します。
sys2 = tf(numerator,denominator,ts,'Variable','z^-1')
sys2 =
1
-------------------
1 + 2 z^-1 + 3 z^-2
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
これで、sys2 の係数は z^-1 の昇べきの順に並べられます。
異なる表記に基づいて、'Variable' プロパティを使用して伝達関数モデルにおける多項式の順序付けを指定できます。
この例では、1 つの調整可能なパラメーター a をもつローパス フィルターを作成します。
tunableTF ブロックの分子と分母の係数が独立しているため、tunableTF を使用して F を表すことはできません。代わりに、調整可能な実数パラメーター オブジェクト realp を使って F を構成します。
初期値 10 の実数の調整可能なパラメーターを作成します。
a = realp('a',10)a =
Name: 'a'
Value: 10
Minimum: -Inf
Maximum: Inf
Free: 1
Real scalar parameter.
調整可能なローパス フィルター F を作成するには、tf を使用します。
numerator = a; denominator = [1,a]; F = tf(numerator,denominator)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: a: Scalar parameter, 2 occurrences. Model Properties Type "ss(F)" to see the current value and "F.Blocks" to interact with the blocks.
F は、Blocks プロパティに調整可能なパラメーター a をもつ genss オブジェクトです。F を他の調整可能なモデルまたは数値モデルと接続して、より複雑な制御システムのモデルを作成できます。例については、調整可能なコンポーネントを含む制御システムを参照してください。
この例では、静的ゲインの MIMO 伝達関数モデルを作成します。
次の 2 入力、2 出力の静的ゲイン行列 m について考えます。
ゲイン行列を指定して静的ゲイン伝達関数モデルを作成します。
m = [2,4;...
3,5];
sys1 = tf(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
上記で取得した静的ゲイン伝達関数モデル sys1 を使用して、別の伝達関数モデルとカスケードさせることができます。
この例では、2 入力 2 出力の離散伝達関数モデルをもう 1 つ作成し、関数 series を使用して 2 つのモデルを接続します。
numerators = {1,[1,0];[-1,2],3};
denominator = [1,0.3];
ts = 0.2;
sys2 = tf(numerators,denominator,ts)sys2 =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
3 z^2 + 2.9 z + 0.6
1: -------------------
z^2 + 0.6 z + 0.09
-2 z^2 + 12.4 z + 3.9
2: ---------------------
z^2 + 0.6 z + 0.09
From input 2 to output...
5 z^2 + 5.5 z + 1.2
1: -------------------
z^2 + 0.6 z + 0.09
-4 z^2 + 21.8 z + 6.9
2: ---------------------
z^2 + 0.6 z + 0.09
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
R2025a 以降
この例では、スパース状態空間モデルの打ち切られた伝達関数モデルを取得する方法を示します。この例では、円柱ロッドの熱分布の熱モデルを線形化することで得られるスパース モデルを使用します。
モデル データを読み込みます。
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
モデルの周波数応答を解析します。
sigmaplot(sys,w)
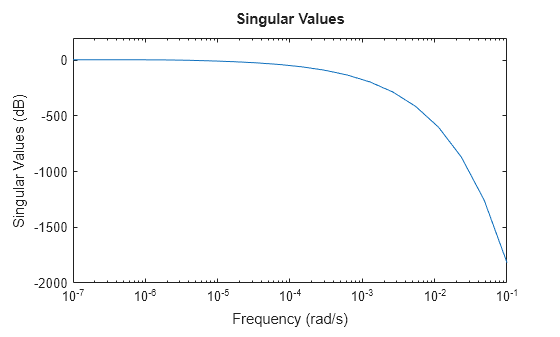
打ち切られた近似を得るには、tf を使用して、焦点の周波数帯域を指定します。このモデルでは、0 rad/s ~ 0.01 rad/s までの周波数範囲を使用することで、低次の近似が得られます。
tsys = tf(sys,Focus=[0 1e-2],Display="off");周波数応答を比較します。
sigmaplot(sys,tsys,w)
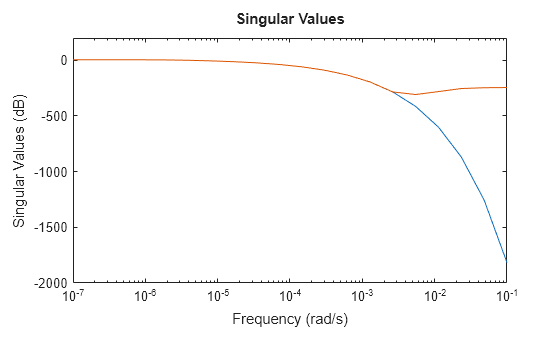
この熱モデルでは、0.001 rad/s を超えると急勾配のロールオフが生じています。既定では、tf を使用して得られた低次元化モデルは、このロールオフに適切に一致しません。これを軽減するために、tf の RollOff 引数を使用して、焦点の周波数帯域を超えたときの最小ロールオフ値を指定できます。ロールオフの傾きの値として -45 を指定します。これは、–900 db/decade 以上のレートに相当します。
tsys2 = tf(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,tsys2,w)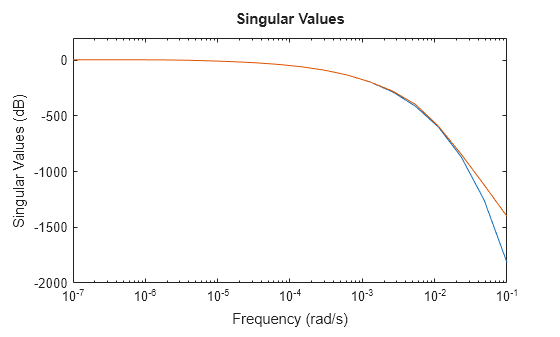
低次元化されたモデルで、ロールオフ値の近似が大幅に改善されました。ただし、この例では、tf を使用してロールオフの傾きを再調整するには、零点と極を再計算する必要があります。そのため、大規模モデルの場合、計算コストが高くなる可能性があります。代わりに、reducespecの零点-極打ち切り法を使用して、ソフトウェアが極と零点を計算した後に、追加の計算コストをかけずにロールオフを調整できます。例については、Zero-Pole Truncation of Thermal Modelを参照してください。
制限
伝達関数モデルは、数値計算に適していません。作成後は他のモデルとの組み合わせやモデルの変換を行う前に、状態空間形式に変換してください。その後、結果のモデルを検査目的で伝達関数形式に変換し直すことができます。
同定された非線形モデルは
tfを使用して伝達関数モデルに直接変換できません。伝達関数モデルを取得するには、次を行います。linapp(System Identification Toolbox)、idnlarx/linearize(System Identification Toolbox)、またはidnlhw/linearize(System Identification Toolbox) を使用して、同定された非線形モデルを同定された LTI モデルに変換します。次に、結果のモデルを
tfを使用して伝達関数モデルに変換します。
アルゴリズム
スパース モデルを変換するために、tf は逆べき乗法に Krylov-Schur アルゴリズム [1] を使用して、指定した周波数帯域内の極と零点を計算します。
参照
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.