lqr
線形 2 次レギュレーター (LQR) 設計
説明
例
pendulumModelCart.mat には、出力がカートの変位 x および振子角度 である、カート上の倒立振子の状態空間モデルが含まれています。制御入力 u はカート上の水平力です。
最初に、状態空間モデル sys をワークスペースに読み込みます。
load('pendulumCartModel.mat','sys')
出力は x および であり、入力は 1 つのみであるため、Bryson の規則を使用して Q および R を決定します。
Q = [1,0,0,0;... 0,0,0,0;... 0,0,1,0;... 0,0,0,0]; R = 1;
lqr を使用してゲイン行列 K を求めます。N は指定されていないため、lqr は N を 0 に設定します。
[K,S,P] = lqr(sys,Q,R)
K = 1×4
-1.0000 -1.7559 16.9145 3.2274
S = 4×4
1.5346 1.2127 -3.2274 -0.6851
1.2127 1.5321 -4.5626 -0.9640
-3.2274 -4.5626 26.5487 5.2079
-0.6851 -0.9640 5.2079 1.0311
P = 4×1 complex
-0.8684 + 0.8523i
-0.8684 - 0.8523i
-5.4941 + 0.4564i
-5.4941 - 0.4564i
通常、Bryson の規則は満足できる結果をもたらしますが、多くの場合これは、設計要件に基づいて閉ループのシステム応答を調整する、試行錯誤による反復設計の開始点にすぎません。
aircraftPitchModel.mat には、入力が昇降舵の偏向角 で、出力が航空機のピッチ角 である航空機の状態空間行列が含まれています。
0.2 ラジアンのステップ指令値について、以下の設計基準を考えます。
立ち上がり時間が 2 秒未満
整定時間が 10 秒未満
定常偏差が 2% 未満
モデルのデータをワークスペースに読み込みます。
load('aircraftPitchModel.mat')状態コストの重み付き行列 Q と、制御の重み付き行列 R を定義します。一般に、Bryson の規則を使用して、初期重み付き行列 Q および R を定義できます。この例では、行列 Q について出力ベクトル C とスケーリング係数 2 を使用するものと考え、R に 1 を選択します。システムの入力は 1 つのみであるため、R はスカラーになります。
R = 1
R = 1
Q1 = 2*C'*C
Q1 = 3×3
0 0 0
0 0 0
0 0 2
lqr を使用してゲイン行列を計算します。
[K1,S1,P1] = lqr(A,B,Q1,R);
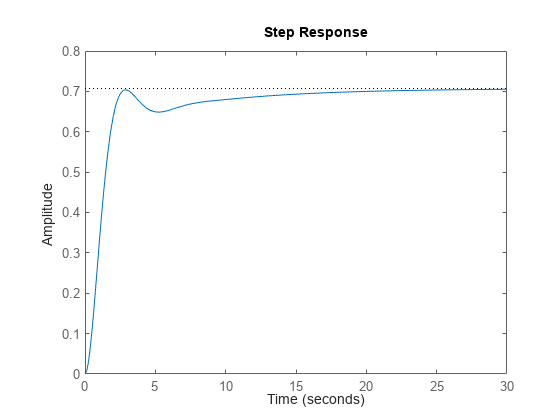
生成されたゲイン行列 K1 による閉ループ ステップ応答を確認します。
sys1 = ss(A-B*K1,B,C,D); step(sys1)
この応答は設計目標を満たさないため、スケーリング係数を 25 に増やし、ゲイン行列 K2 を計算して、ゲイン行列 K2 についての閉ループ ステップ応答を確認します。
Q2 = 25*C'*C
Q2 = 3×3
0 0 0
0 0 0
0 0 25
[K2,S2,P2] = lqr(A,B,Q2,R); sys2 = ss(A-B*K2,B,C,D); step(sys2)
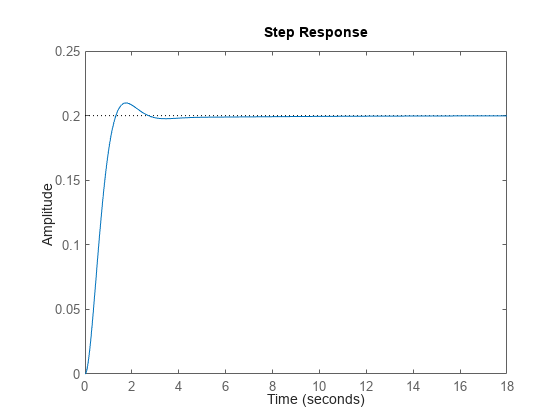
閉ループ ステップ応答プロットでは、立ち上がり時間、整定時間、および定常偏差が設計目標を満たしています。
入力引数
出力引数
制限
入力データは以下の条件を満たさなければなりません。
(A,B) のペアは可安定でなければならない。
R は正定値でなければならない。
は半正定値 (つまり ) でなければならない。
の虚軸 (離散時間の場合は単位円) に不可観測モードがあってはならない。
ヒント
lqrは、正則なEをもつ記述子モデルをサポートします。lqrの出力Sは、次の等価な陽的状態空間モデルに対する代数リカッチ方程式の解です。
アルゴリズム
連続時間システムの場合、lqr は次の 2 次コスト関数を最小にする状態フィードバック制御 を計算します。
これは、システム ダイナミクス に従います。
状態フィードバック ゲイン K のほかに、lqr は関連する次の代数リカッチ方程式の解 S を返します。
また、閉ループ極 を返します。ゲイン行列 K は、以下を使用して S から導出されます。
離散時間システムの場合、lqr は以下を最小にする状態フィードバック制御 を計算します。
これは、システム ダイナミクス に従います。
いずれの場合も、交差項行列 N を省略すると、lqr は N を 0 に設定します。
バージョン履歴
R2006a より前に導入