状態空間の制御設計
LQG/LQR および極配置アルゴリズムなどの状態空間の制御設計法は MIMO 設計に役立ちます。
関数
トピック
- 線形 2 次ガウシアン (LQG) 設計
線形 2 次ガウシアン (LQG) 制御は、レギュレーターやトラッキング コントローラーの性能と制御操作のトレードオフを行い、プロセスの外乱と測定ノイズを考慮できる状態空間手法です。
- LQG レギュレーター: 圧延機のケース スタディ
スチール圧延機におけるビーム厚のレギュレーションのための線形 2 次ガウシアン法を使用します。
- 制御システム デザイナーを使用した LQG トラッカーの設計
LQG 合成を使用して、ディスク ドライブの読み取り/書き込みヘッドのフィードバック コントローラーを設計します。
- ジェット機のヨー ダンパーの設計
このケース スタディでは、古典的設計プロセスについて説明します。
- LQG レギュレーターの設計
ノイズがあるシステムでプラント出力の LQG レギュレーターを設計します。
- LQG サーボ コントローラーの設計
カルマン状態推定器を使用して LQG サーボ コントローラーを設計します。
- Simulink での LQR サーボ コントローラーの設計
Simulink® でモデル化されるシステムの LQR コントローラーを設計する。
- 極配置
閉ループの極の位置は、立ち上がり時間、整定時間、遷移部の振動等の時間応答特性に直接影響します。極配置では、状態空間手法を使用して閉ループ極を割り当てます。
注目の例
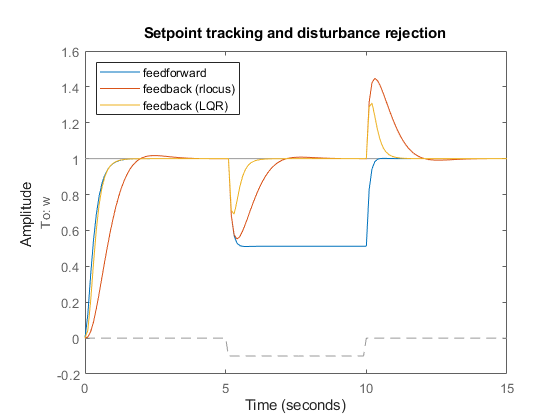
DC モーター制御
設定点コマンドに追従し、負荷外乱に対する感度を下げるための、3 つの DC モーター制御手法を比較する。
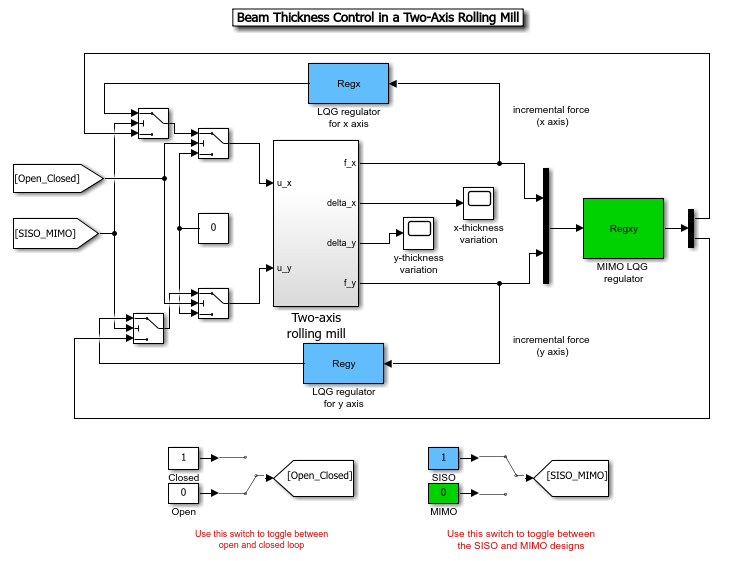
鉄の梁の厚さの制御
熱間鋼板圧延機の鉄の梁の水平および垂直方向の厚さを制御するために MIMO LQG 制御器を設計する。

ドラム ボイラーの圧力の調整
この例では、応用例にドラム ボイラーを使って、Simulink® Control Design™ ソフトウェアの使用方法を説明します。この例は操作点探索関数を使用して、モデルの線形化だけでなく、それ以降の状態オブザーバーおよび LQR の設計についても説明します。このドラム ボイラー モデルにおける制御上の問題は、給水の流量と適用する熱量のノミナル値を調整することで、炉からのランダムな熱変動に対してボイラーの圧力を安定化することです。この例の場合、ランダムな熱変動の 95% は熱量のノミナル値の 50% 未満であり、炉による燃焼ボイラーとしては異常ではありません。