制御システム デザイナーを使用した LQG トラッカーの設計
この例では、制御システム デザイナーを使用してディスク ドライブの読み書きヘッドのフィードバック コントローラーを設計するために LQG 合成を使用する方法について説明します。
システムとモデルの詳細は、Franklin、Powell、Workman による『Digital Control of Dynamic Systems』の第 14 章を参照してください。
ディスク ドライブ モデル
モデル化するシステムの図を以下に示します。
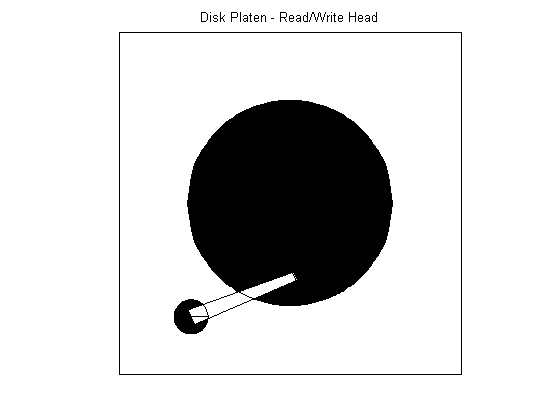
モデルの入力はボイス コイル モーターを駆動する電流であり、出力は位置誤差信号 (PES、トラック幅の比 (%)) です。10 次モデルの詳細については、ハード ディスク ドライブのデジタル サーボ制御を参照してください。プラントにはわずかなむだ時間があります。この例ではその目的に鑑み、この遅延は無視します。
load diskdemo Gr = tf(1e6,[1 12.5 0]); Gf1 = tf(w1*[a1 b1*w1],[1 2*z1*w1 w1^2]); % first resonance Gf2 = tf(w2*[a2 b2*w2],[1 2*z2*w2 w2^2]); % second resonance Gf3 = tf(w3*[a3 b3*w3],[1 2*z3*w3 w3^2]); % third resonance Gf4 = tf(w4*[a4 b4*w4],[1 2*z4*w4 w4^2]); % fourth resonance G = (ss(Gf1)+Gf2+Gf3+Gf4) * Gr; % convert to state space for accuracy
設計の概要
この例では、読み書きヘッドを適切な位置におくフルオーダー LQG トラッカーを設計します。LQG トラッカーを調整して、特定の性能要件を達成し、可能な限りコントローラーの次数を低減します。たとえば、LQG トラッカーを PI コントローラー形式に調整します。
制御システム デザイナーを開く
"制御システム デザイナー" を開き、プラント モデルをインポートします。
controlSystemDesigner(G)
既定では、開ループ応答に対するグラフィカルなボード エディターおよび根軌跡エディターと共に、"制御システム デザイナー" に閉ループ システムのステップ応答が表示されます。
ステップ応答のみを表示するには、プロットの右上隅にある矢印をクリックし、[すべて並べて表示]、[単一表示] を選択します。
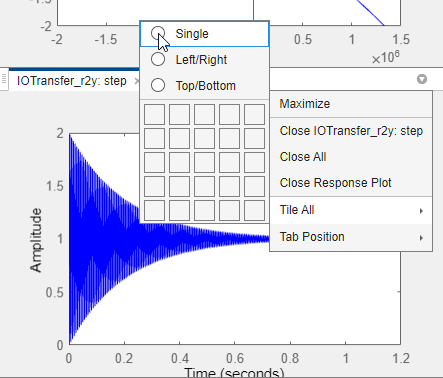
ドキュメント エリアでステップ応答プロットが拡大されます。"制御システム デザイナー" の使用方法の詳細については、制御システム デザイナー入門を参照してください。
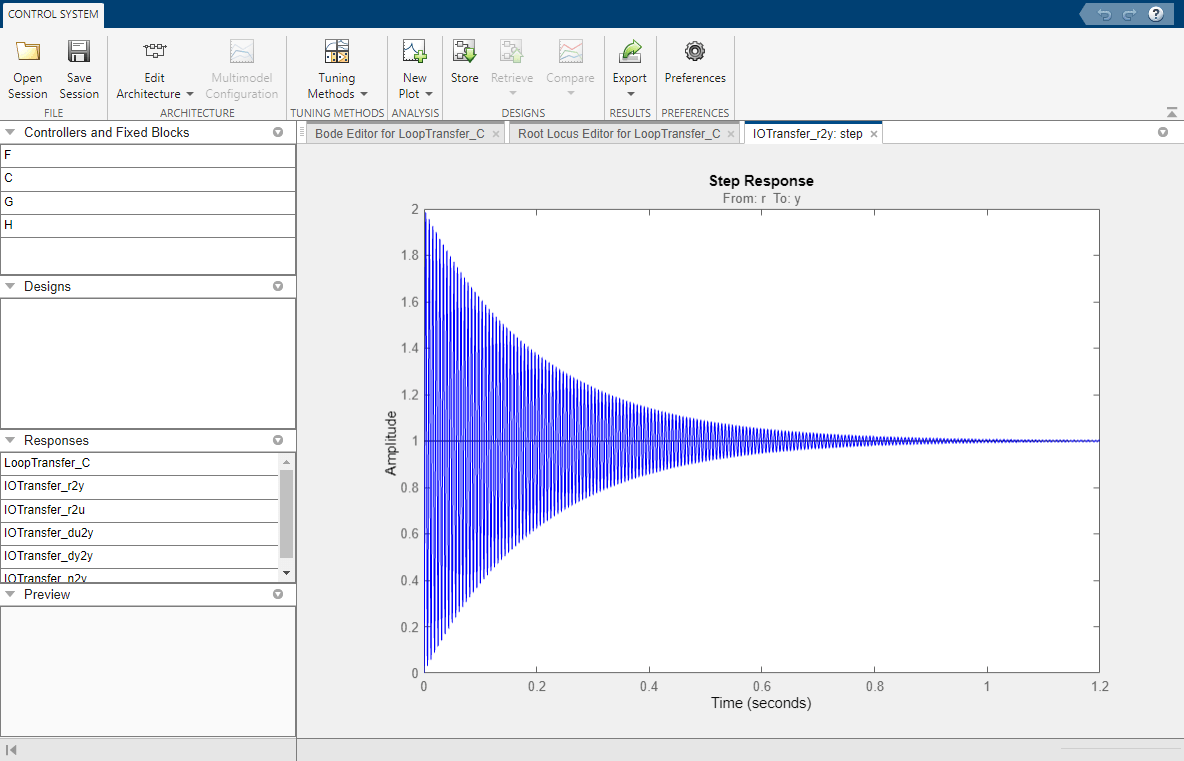
既定のユニティー ゲインの補償器により、大きな振幅のある安定した閉ループ システムが生成されます。
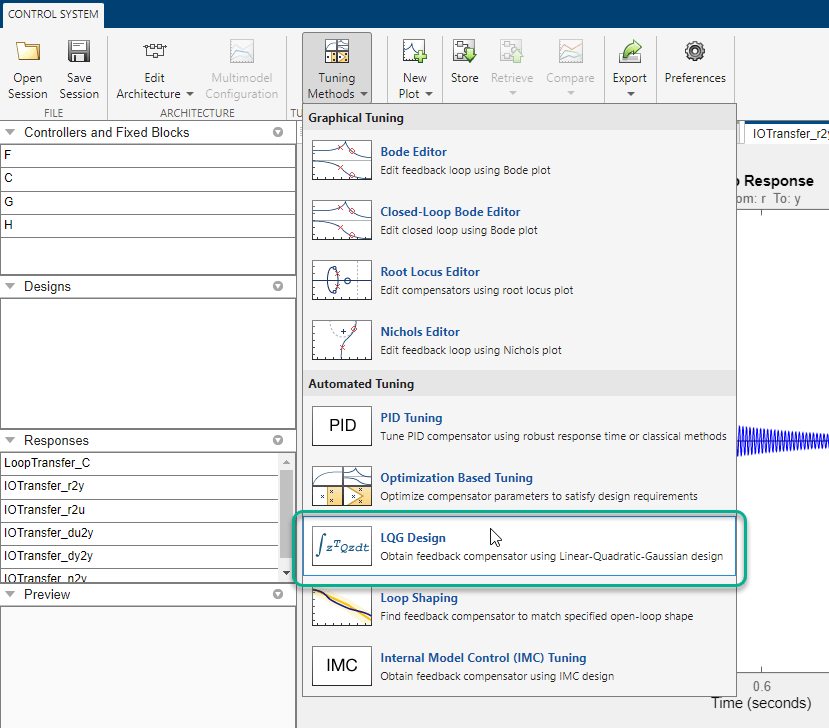
フルオーダー LQG トラッカーの設計
LQG トラッカーを設計するには、[調整法] をクリックし、[LQG 設計] を選択します。
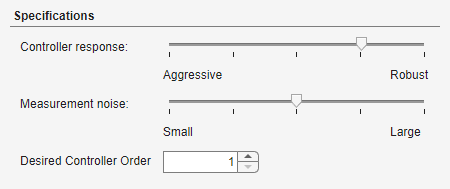
[LQG 設計] ダイアログ ボックスの [仕様] セクションで、コントローラー性能の要件を設定します。
コントローラーの応答 - コントローラーの過渡動作を指定します。コントローラーを外乱の抑制に対してよりアグレッシブにしたり、プラントの不確かさに対してよりロバストにしたりすることができます。モデルが正確で、操作変数が十分大きな範囲であると考えられる場合は、アグレッシブなコントローラーが適しています。
測定ノイズ - アプリケーションの出力測定ノイズのレベルの推定を指定します。よりロバストなコントローラーを生成するには、大きなノイズ推定値を指定します。
望ましいコントローラー次数 - コントローラー次数の設定を指定します。
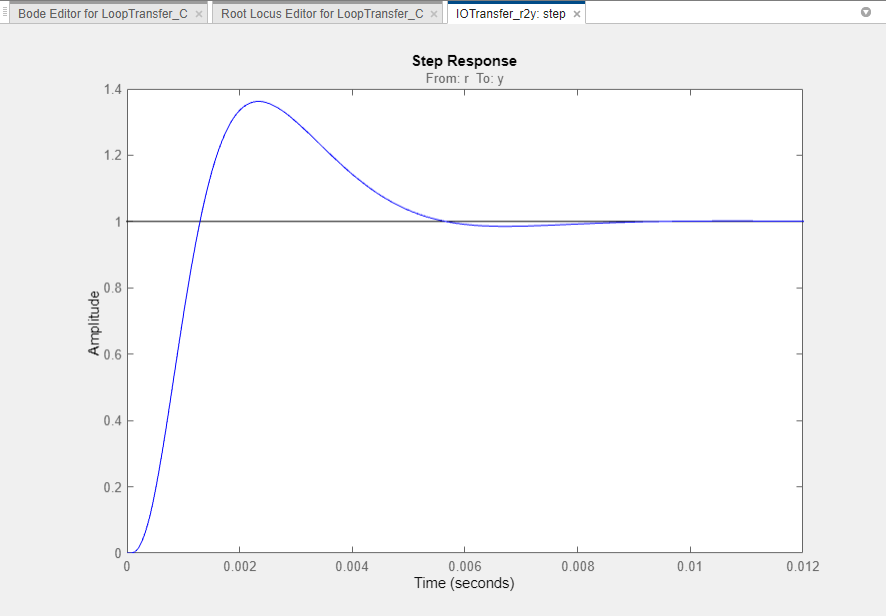
最大次数の初期コントローラーの設計では、[コントローラーの応答] と [測定] のスライダーを中央に設定し、[望ましいコントローラー次数] を 11 に設定します。
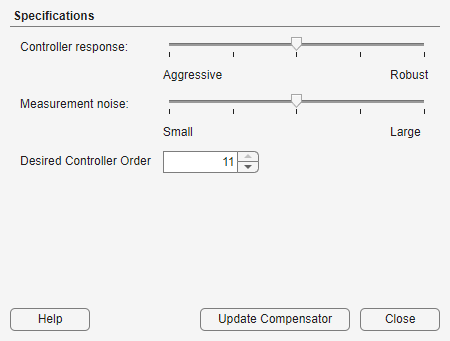
[補償器の更新] をクリックします。新しい [補償器] が表示され、ステップ応答が更新されます。
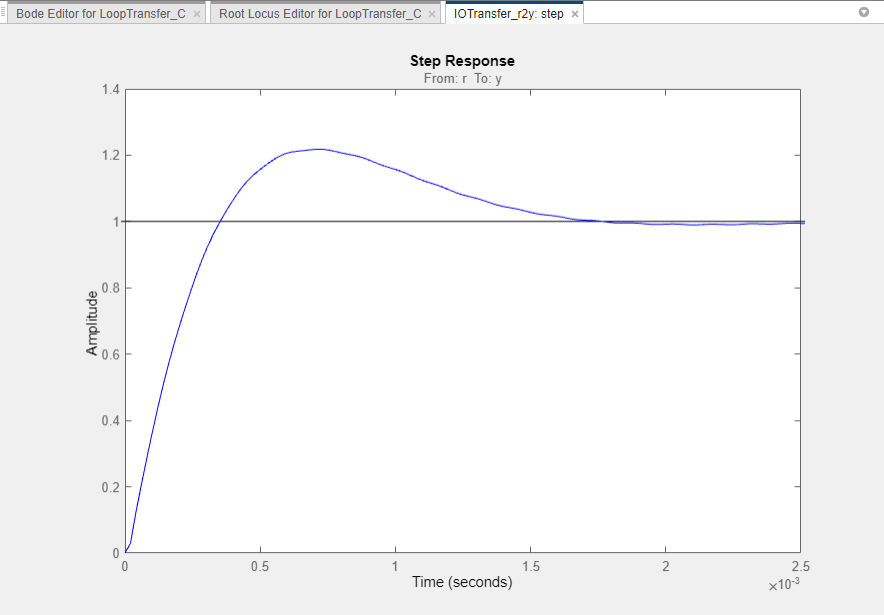
さらにアグレッシブなコントローラーを設計するには、[コントローラーの応答] スライダーを左端に移動し、[補償器の更新] をクリックします。よりアグレッシブなコントローラーによって、オーバーシュートが 50%、整定時間が 70% 減少します。
低次元化された LQG トラッカーの設計
PI コントローラーを作成するには、[コントローラーの応答] スライダーを中央の値にリセットし、[望ましいコントローラー次数] を 1 に設定します。
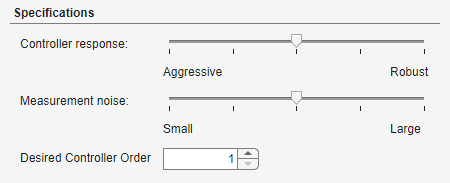
[補償器の更新] をクリックします。
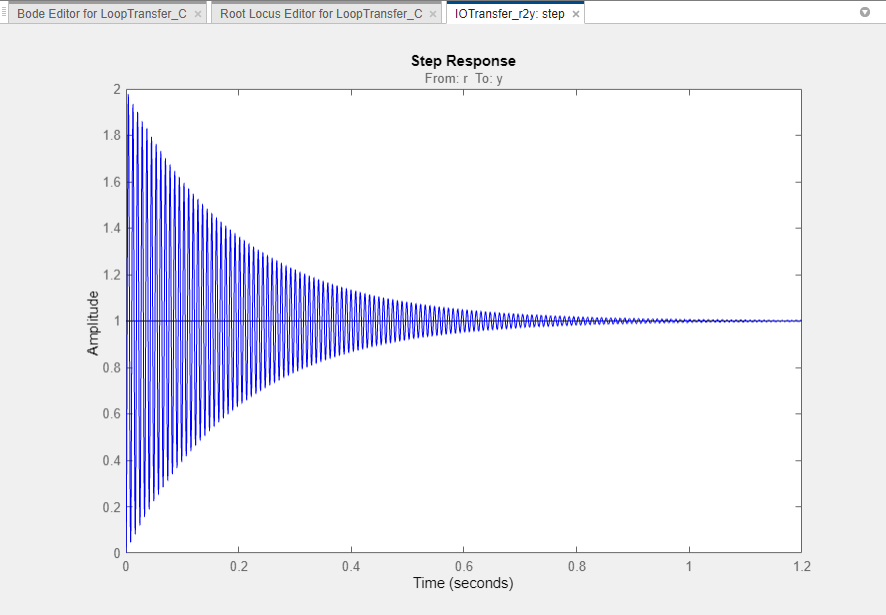
このコントローラーは、大きく振動する閉ループ システムを作成します。コントローラーのアグレッシブの度合いを低減するには、[コントローラーの応答] スライダーを右方向に移動します。
[補償器の更新] をクリックします。
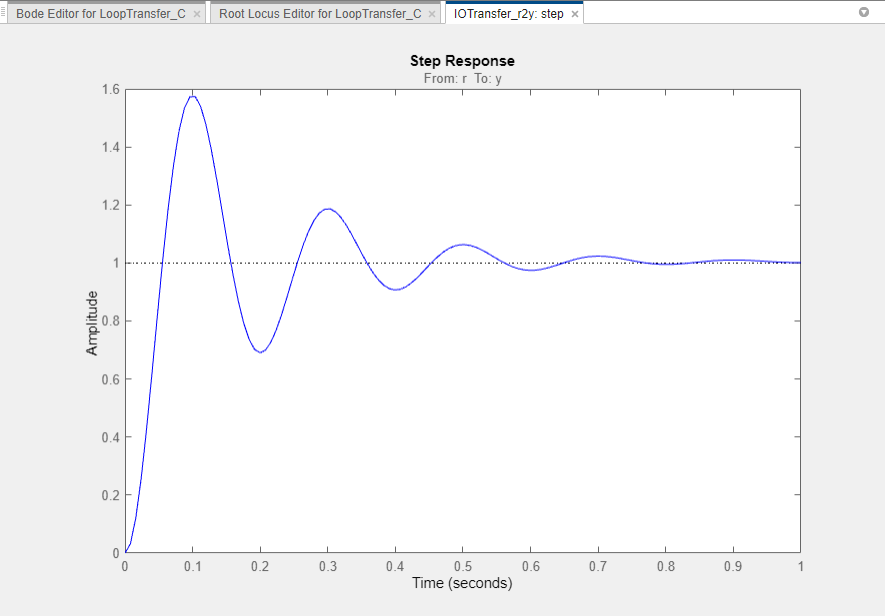
ステップ応答には、PI コントローラーの設計によって、最適化ベースの設計を開始するための適切な設計が用意されたことが示されています。詳細については、制御システム デザイナー入門を参照してください。