このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
ハード ディスク ドライブのデジタル サーボ制御
この例では、Control System Toolbox™ を使用してディスク ドライブの読み取り/書き込みヘッドのデジタル サーボ コントローラーを設計する方法を示します。
システムとモデルの詳細は、Franklin、Powell、Workman による『Digital Control of Dynamic Systems』の第 14 章を参照してください。
ディスク ドライブ モデル
モデル化するシステムの図を以下に示します。
ヘッド ディスク アセンブリ (HDA) およびアクチュエータは、2 つの剛体モードと 4 つの共振点がある 10 次の伝達関数によってモデル化されています。
モデルの入力は、ボイス コイル モーターを駆動する電流 ic、出力は、位置誤差信号 (PES、トラック幅の比 (%)) です。また、モデルには、わずかな遅延も含まれています。
ディスク ドライブ モデル:
![]()
![]()
![]()
主要な柔軟モードの結合係数、減衰、および固有振動数 (Hz 単位) は、以下に示されています。
モデル データ:
![]()
![]()
![]()
![]()
このデータを基に、ヘッド アセンブリのノミナル モデルを作成します。
load diskdemo Gr = tf(1e6,[1 12.5 0],'outputdelay',1e-5); Gf1 = tf(w1*[a1 b1*w1],[1 2*z1*w1 w1^2]); % first resonance Gf2 = tf(w2*[a2 b2*w2],[1 2*z2*w2 w2^2]); % second resonance Gf3 = tf(w3*[a3 b3*w3],[1 2*z3*w3 w3^2]); % third resonance Gf4 = tf(w4*[a4 b4*w4],[1 2*z4*w4 w4^2]); % fourth resonance G = Gr * (ss(Gf1) + Gf2 + Gf3 + Gf4); % convert to state space for accuracy
ヘッド アセンブリ モデルのボード応答を以下のようにプロットします。
G.InputName = 'ic'; G.OutputName = 'PES'; bp = bodeplot(G); title('Bode diagram of the head assembly model'); bp.FrequencyUnit = 'Hz'; xlim([1 1e5])

サーボ コントローラー
サーボ制御は、読み書きヘッドを「トラック上」に維持するために使用されます。サーボ コントローラー C(z) は、デジタルです。また、PES (トラックの中心からのオフセット) をゼロ近辺に維持するために設計されています。
ここで考慮されている外乱は、入力電流 ic 内のステップ変化 d です。この作業の目的は、適切な外乱の抑制性能のあるデジタル補償器 C(z) を設計することです。
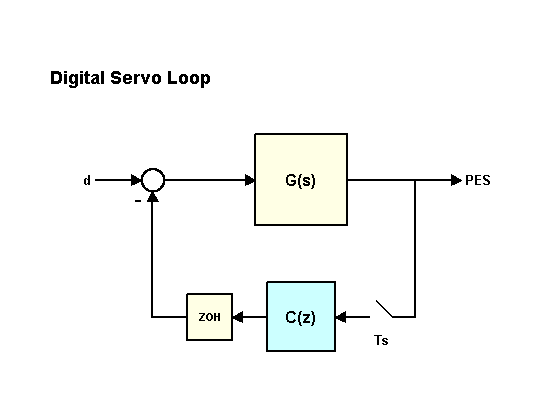
デジタル サーボのサンプル時間は、Ts = 7e-5 sec (14.2 kHz) です。
現実的な設計仕様を以下に示します。
設計仕様:
開ループ ゲイン > 20dB (100 Hz において)
帯域幅 > 800 Hz
ゲイン余裕 > 10 dB
位相余裕 > 45 度
ピーク閉ループ ゲイン < 4 dB
モデルの離散化
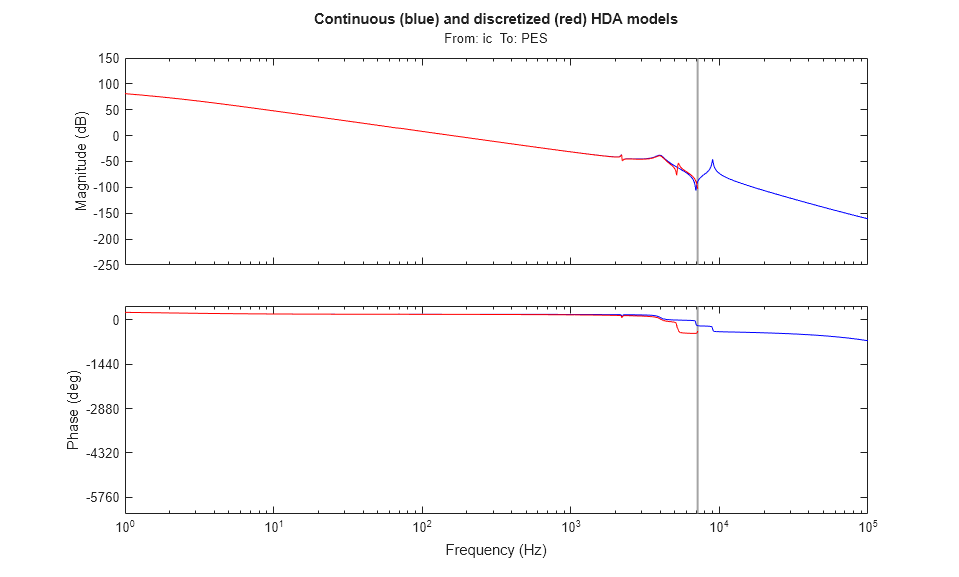
サーボ コントローラーはデジタルであるため、離散領域内に設計できます。このためには、C2D およびゼロ次ホールド (ZOH) 手法を使用して HDA モデルを離散化します。
Ts = 7e-5; Gd = c2d(G,Ts); bp = bodeplot(G,'b',Gd,'r'); % compare with the continuous-time model title('Continuous (blue) and discretized (red) HDA models'); bp.FrequencyUnit = 'Hz'; xlim([1 1e5])
コントローラー設計
ここでは、補償器の設計を行います。純積分器 1/(z-1) から開始し、ゼロ定常状態誤差の確保、開ループ モデル Gd*C の根軌跡のプロット、および [ツール] メニューの [ズームイン] オプションを使用したズームの z=1 付近でのズームを行います。
C = tf(1,[1 -1],Ts);
rp = rlocusplot(Gd*C);
xlim([-1.5 1.5])
ylim([-1 1])
grid on
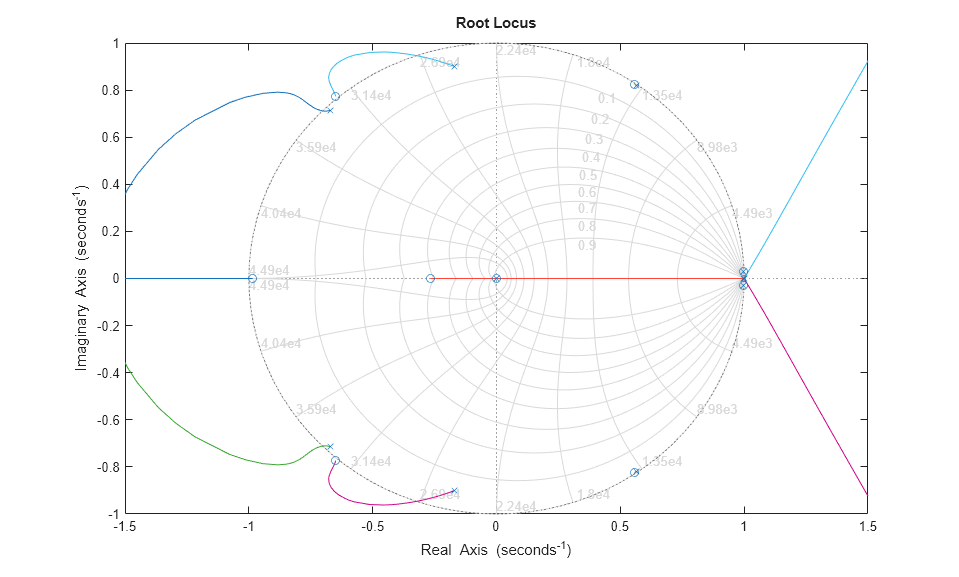
z=1 での 2 つの極のため、サーボ ループは、すべての正のゲインに対して不安定になります。フィードバック ループを安定化するには、まず、z=1 近辺に 2 つのゼロ点を追加します。
C = C * zpk([.963,.963],-0.706,1,Ts);
rp = rlocusplot(Gd*C);
xlim([-1.25 1.25])
ylim([-1.2 1.2])
grid on

次に、軌跡をクリックし、黒い四角形を単位円内にドラッグしてループ ゲインを調整します。ループ ゲインが、データ マーカーに表示されます。約 50 のゲインによってループが安定化します (C1 = 50*C に設定)。
C1 = 50 * C;
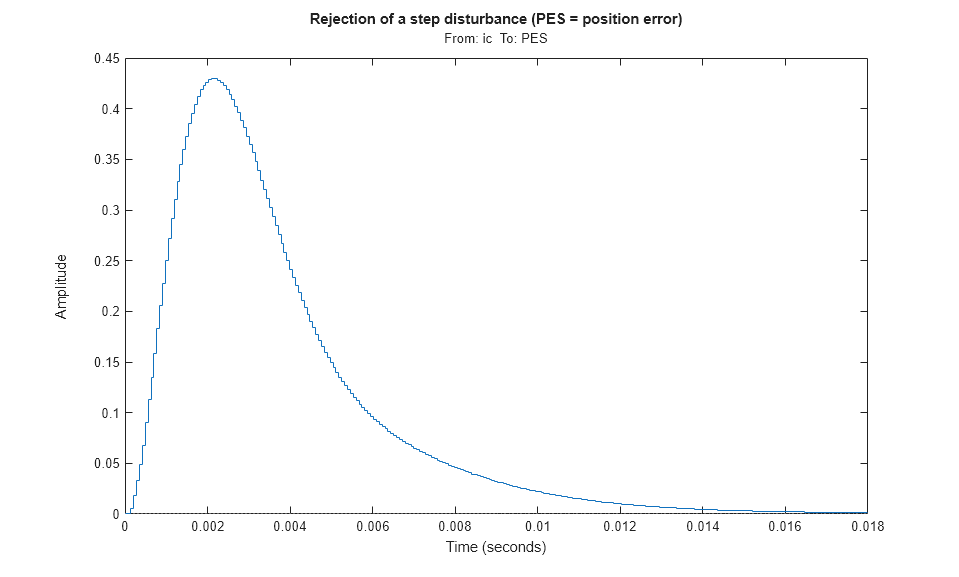
ここで、電流のステップ外乱への閉ループの応答をシミュレートします。外乱は、スムーズに除外されますが、PES が大きすぎます (ヘッドがトラック中心から、トラック幅の 45% ずれています)。
cl_step = feedback(Gd,C1);
sp = stepplot(cl_step);
title('Rejection of a step disturbance (PES = position error)')
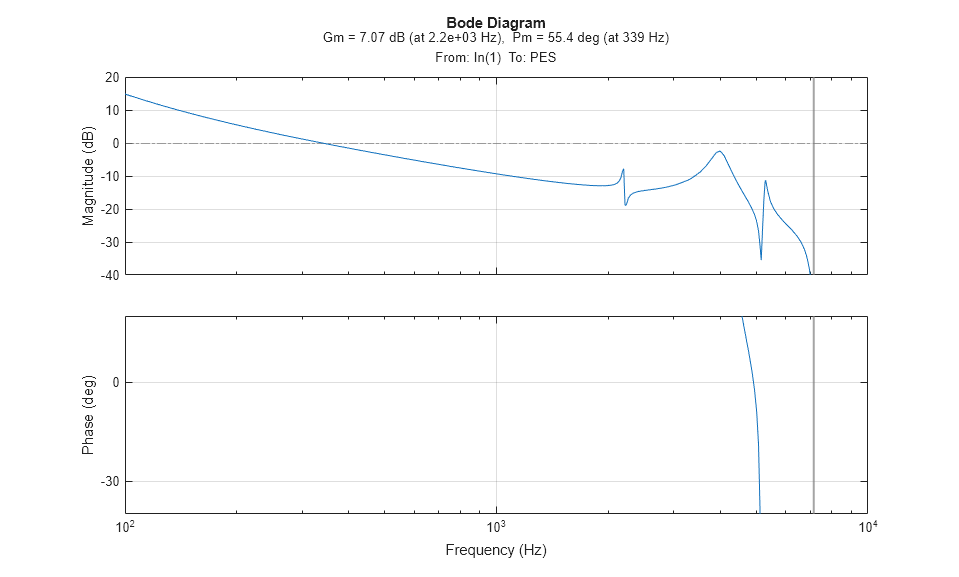
次に、開ループのボード応答と安定余裕を見てください。100 Hz でのゲインは、15 dB のみであり (仕様では 20 dB)、ゲイン余裕は 7dB のみです。このため、ループ ゲインの増加はできません。
margin(Gd*C1) diskdemo_aux1(1);
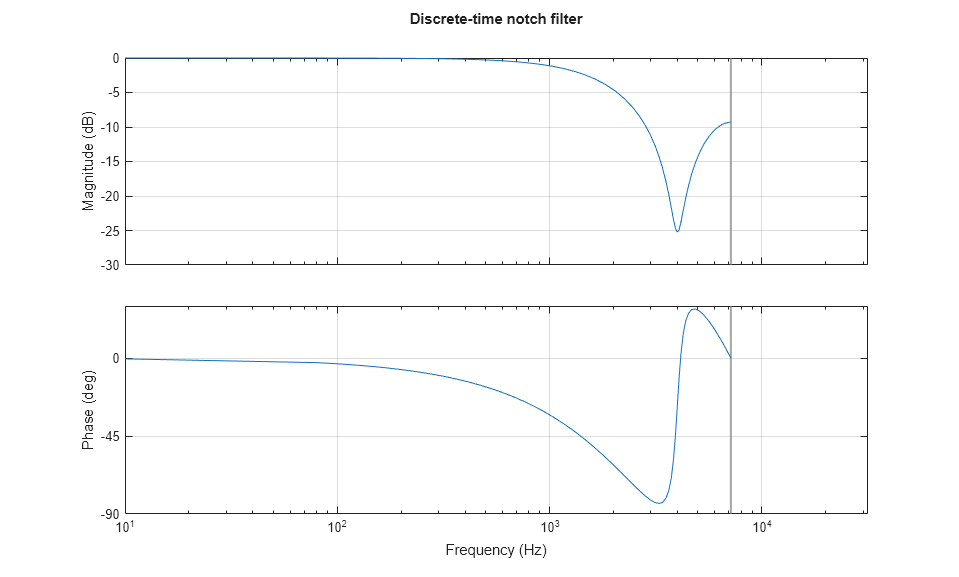
さらに大きな低周波ゲインのための余裕を作成するには、ノッチ フィルターを 4000 Hz 共振点近辺に追加します。
w0 = 4e3 * 2*pi; % notch frequency in rad/sec notch = tf([1 2*0.06*w0 w0^2],[1 2*w0 w0^2]); % continuous-time notch notchd = c2d(notch,Ts,'matched'); % discrete-time notch C2 = C1 * notchd; bp = bodeplot(notchd); title('Discrete-time notch filter'); bp.FrequencyUnit = 'Hz'; grid on
これで、ループ ゲインを安全に 2 倍にできます。結果として得られる 100 Hz での安定余裕およびゲインは、仕様に準拠しています。
C2 = 2 * C2; margin(Gd * C2) diskdemo_aux1(2);

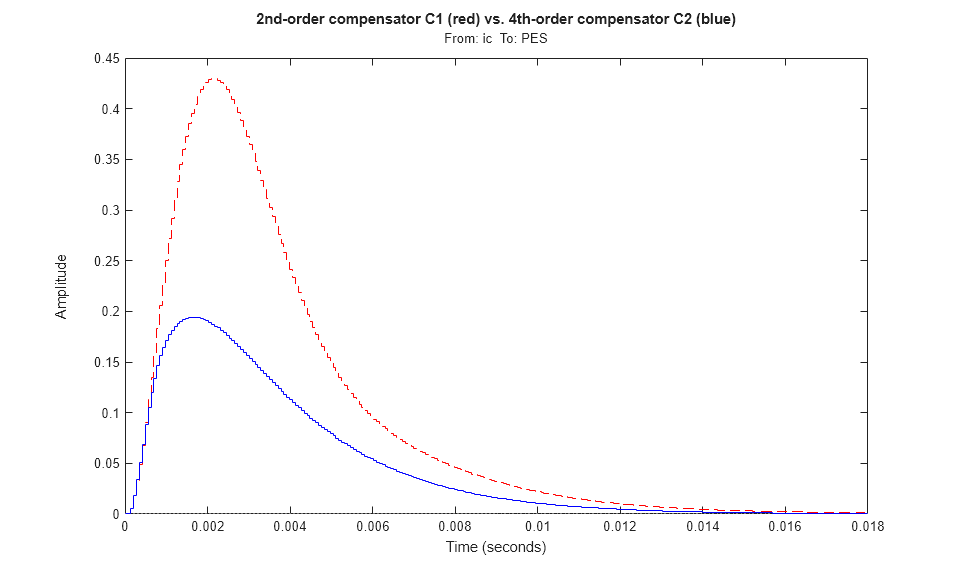
ステップ外乱の抑制は、大幅に改善されました。PES は、現時点でトラック幅の 20% 以下に収まっています。
cl_step1 = feedback(Gd,C1); cl_step2 = feedback(Gd,C2); stepplot(cl_step1,'r--',cl_step2,'b') title('2nd-order compensator C1 (red) vs. 4th-order compensator C2 (blue)')
T = Gd*C/(1+Gd*C) (閉ループ感度) 上で3dB のピーク ゲイン仕様が満足されているかどうかを確認します。
Gd = c2d(G,Ts); Ts = 7e-5; T = feedback(Gd*C2,1); bp = bodeplot(T); bp.PhaseVisible = 'off'; bp.FrequencyUnit = 'Hz'; xlim([1e2 1e4]) title('Peak response of closed-loop sensitivity T(s)') grid on

ピーク値を表示するには、軸を右クリックし、[特性] メニューの [ピーク応答] オプションを選択してから、マウスを青いマーカー上に置いたままにするか、クリックします。
ロバスト性解析
最後に、2 番目と 3 番目の柔軟モードの減衰と固有振動数での変化に対するロバスト性を解析します。
パラメーターの変動は以下になります。
![]()
![]()
![]()
![]()
極値 z2、w2、z3、w3 のすべての組み合わせに対応する 16 モデルの配列を生成します。
[z2,w2,z3,w3] = ndgrid([.5*z2,1.5*z2],[.9*w2,1.1*w2],[.5*z3,1.5*z3],[.8*w3,1.2*w3]); for j = 1:16, Gf21(:,:,j) = tf(w2(j)*[a2 b2*w2(j)] , [1 2*z2(j)*w2(j) w2(j)^2]); Gf31(:,:,j) = tf(w3(j)*[a3 b3*w3(j)] , [1 2*z3(j)*w3(j) w3(j)^2]); end G1 = Gr * (ss(Gf1) + Gf21 + Gf31 + Gf4);
これらの 16 モデルを一度に離散化し、開ループ応答にパラメーターの変動がどのように影響を及ぼすかを確認します。メモ: 基礎となるモデルを識別するために任意の曲線をクリックします。
Gd = c2d(G1,Ts); bp = bodeplot(Gd*C2); bp.FrequencyUnit = 'Hz'; bp.MagnitudeUnit = 'dB'; bp.PhaseUnit = 'deg'; xlim([8e2 8e3]) title('Open-loop response - Monte Carlo analysis') grid on

これらの 16 モデルでのステップ外乱の抑制性能をプロットします。
stepplot(feedback(Gd,C2))
title('Step disturbance rejection - Monte Carlo analysis')

16 の応答のすべてがほとんど同じになります。このサーボ設計はロバストです。