古典制御設計
単入力、単出力 (SISO) フィードバック システムの設計、調整および解析
制御システム デザイナー アプリを使用して、フィードバック システムの単入力単出力 (SISO) コントローラーを対話的に設計および解析できます。さまざまなグラフィカルな調整および自動調整の方法を使用してコントローラーを設計できます。アプリケーションに最も適した調整法を選択するには、制御システム デザイナーの調整法を参照してください。
Simulink® モデルでの SISO コントローラーの調整の詳細については、対話的でグラフィカルな調整 (Simulink Control Design)を参照してください。
アプリ
| 制御システム デザイナー | 単入力単出力 (SISO) コントローラーの設計 |
関数
rlocus | 動的システムの根軌跡 |
rlocusplot | 根軌跡をプロットしてプロット ハンドルを返す |
sisoinit | 起動時の制御システム デザイナーの構成 |
openloopeditor | Open-loop editor for SISO control systems (R2025a 以降) |
トピック
制御設計の基礎
- 制御設計法の選択
Control System Toolbox™ では複数の制御システムの調整手法を提供しています。 - 制御システム デザイナー入門
制御システム デザイナー アプリを使用してフィードバック制御システム用補償器を調整する。 - 制御システム デザイナーの調整法
各種のグラフィカルな調整法や自動調整法により補償器を調整することができます。 - 制御システム デザイナーでの制御アーキテクチャのフィードバック
制御システム デザイナーを MATLAB® から開くときは、6 つの可能な制御アーキテクチャ構成から 1 つを選択できます。 - 設計要件
制御システム デザイナーを使用して、補償器を調整してさまざまな時間領域および周波数領域の設計要件を満たすことができます。 - プログラムによる制御システム デザイナーの初期化
コマンド ラインを使用して制御システム デザイナーを構成し、制御システム デザイナー セッションの起動をカスタマイズする関数を作成する。
補償器の調整
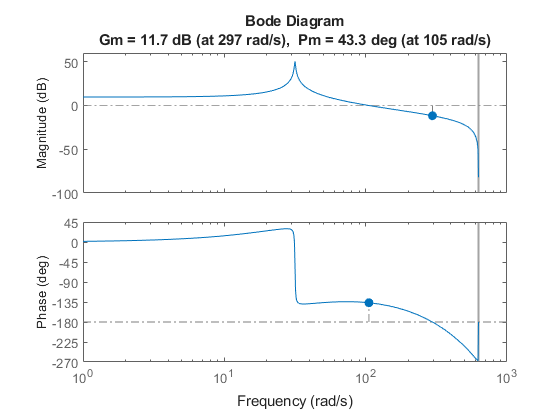
- ボード線図設計
ボード線図設計は、特定の開ループ応答を達成するために補償器を変更する対話型のグラフィカルな方法です。 - 根軌跡の設計
根軌跡のグラフィカルな調整手法を使用して、電気油圧サーボ機構の補償器を設計する。 - ニコルス線図設計
ニコルス線図設計は、特定の開ループ応答を達成するために補償器を変更する対話型のグラフィカルな方法です。 - 制御システム デザイナーでの補償器のダイナミクスの編集
制御システム デザイナー アプリで補償器の極、零点、ゲインを手動で編集して、設計目標を達成する。 - 自動調整法を使用した補償器の設計
制御システム デザイナーで自動調整法を使用して補償器を調整する。 - Design Compensator Using Open-Loop Editor
To design a compensator using a standalone open-loop editor, manually edit compensator poles, zeros, and gains. (R2025a 以降)
Simulink での補償器の調整
- 補償器エディターを使用した Simulink ブロックの調整
制御システム デザイナーの [補償器エディター] ダイアログ ボックスを使用して Simulink ブロックを調整する。 - 単ループのフィードバック/プレフィルターの補償器設計
フィードバック補償器を使用して単一ループ システムの閉ループ性能を調整した後、プレフィルターを使って基準信号の変化に対するシステム応答を調整します。 - カスケード マルチループ フィードバック設計
カスケード マルチループ システムの補償器を設計するには、まず内側のループに対する補償器を調整してから、外側のループの補償器を調整します。
特殊な特性をもつシステム
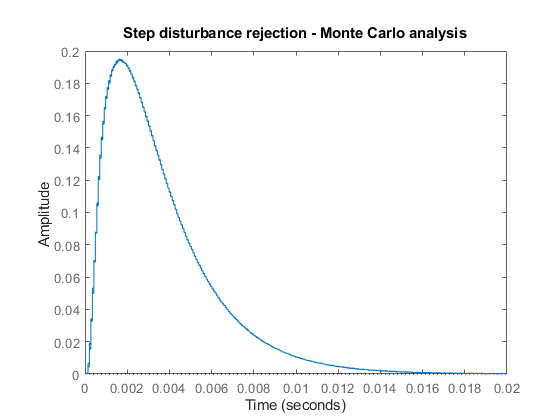
- プラント モデル セットのための補償器の設計
制御システム デザイナー アプリを使用して複数のプラント モデルのコントローラーを設計および解析する。 - マルチモデルの制御設計
制御システム デザイナーを使用して、一連のプラント モデルの補償器を設計します。 - むだ時間をもつプラント モデルの補償器設計
制御システム デザイナーでは一部の設計および解析ツールで正確なむだ時間がサポートされますが、その他のツールはむだ時間に近似を使用します。 - 周波数応答データで表されるシステムの補償器の設計
制御システム デザイナーを使用して周波数応答データによって定義されたプラント モデルの補償器を設計します。 - マルチループ制御システムの設計
制御システム デザイナーを使用して、内側のループと外側のループをもつ制御システムの補償器を設計します。
解析と検証
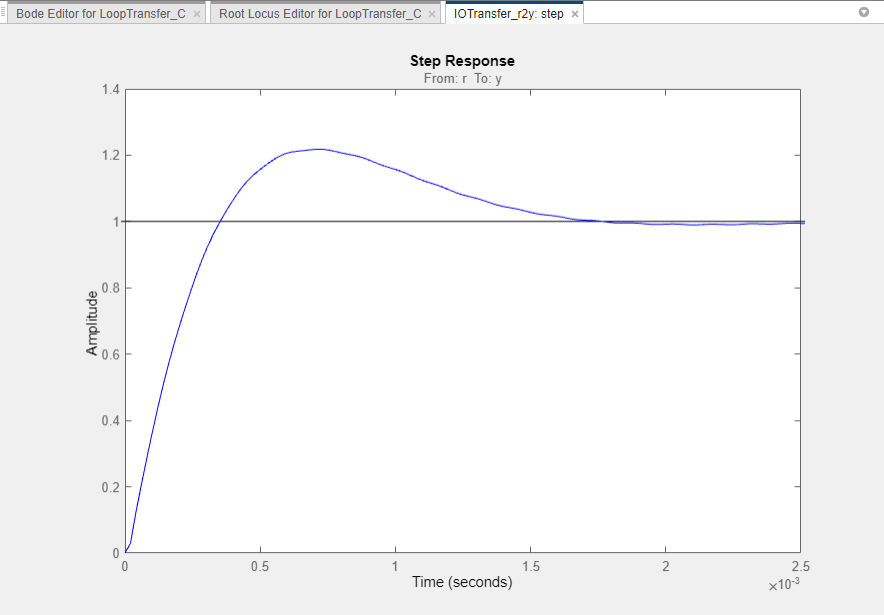
- 応答プロットを使用した設計の解析
制御システム デザイナーのプロット ツールを使用して制御システムの設計を解析します。 - 複数の設計の性能の比較
複数の補償器設計の性能を比較して、異なる調整法または補償器の構造の影響を調べます。
注目の例

化学反応器プラントの内部モデル コントローラーの設計
制御システム デザイナーを使用して化学反応器に対して IMC 構造内に補償器を設計します。
制御システム デザイナーを使用した LQG トラッカーの設計
LQG 合成を使用して、ディスク ドライブの読み取り/書き込みヘッドのフィードバック コントローラーを設計します。
ハードディスクの読み取り/書き込みヘッド コントローラーの設計
古典制御設計法を使用して、コンピューターのハードディスクの読み取り/書き込みヘッド位置コントローラーを設計します。

パラメーターが変化する DC モーターの設定値追従
この例では、Simulink® モデルからの制御システムのプラントの変化を表す、LTI モデルの配列を生成する方法を説明します。このモデルの配列は、制御システム デザイナーで制御設計に使用されます。
ハード ディスク ドライブのデジタル サーボ制御
Control System Toolbox ソフトウェアを使用してディスク ドライブの読み取り/書き込みヘッドのデジタル サーボ コントローラーを設計する。

747 ジェット航空機のヨー ダンパーの設計
Control System Toolbox ソフトウェアの古典制御設計機能を使用した 747® 航空機のヨー ダンパーの設計。

フィードバック アンプの設計
Control System Toolbox ソフトウェアを使用して非反転フィードバック アンプ回路を設計する。