ハードディスクの読み取り/書き込みヘッド コントローラーの設計
この例では、古典制御設計法を使用して、コンピューターのハードディスクの読み取り/書き込みヘッド位置コントローラーを設計する方法を説明します。

読み取り/書き込みヘッド モデルの作成
ニュートンの法則に基づき、次の微分方程式を使用して読み取り/書き込みヘッドをモデル化します。
ここで
 はヘッド アセンブリの慣性です。
はヘッド アセンブリの慣性です。 はベアリングの粘性減衰係数です。
はベアリングの粘性減衰係数です。 は戻しバネ定数です。
は戻しバネ定数です。 はモーター トルク定数です。
はモーター トルク定数です。 はヘッドの角度位置です。
はヘッドの角度位置です。 は入力電流です。
は入力電流です。
ラプラス変換を使用すると、 から への伝達関数は次のようになります。
次を満たすようなモデルの物理定数を指定します。




J = 0.01; C = 0.004; K = 10; Ki = 0.05;
これらの定数を使用して伝達関数を定義します。
num = Ki; den = [J C K]; H = tf(num,den)
H =
0.05
-----------------------
0.01 s^2 + 0.004 s + 10
Continuous-time transfer function.
モデルの離散化
読み取り/書き込みヘッドの正確な位置決めを行うデジタル コントローラーを設計するには、まず連続時間プラントを離散化します。
サンプル時間を指定します。
Ts = 0.005;
モデルを離散化します。コントローラーはその入力に接続された (ゼロ次ホールドの) デジタル アナログ コンバーターをもつので、c2d コマンドを使用して 'zoh' 離散化手法を指定します。
Hd = c2d(H,Ts,'zoh')
Hd = 6.233e-05 z + 6.229e-05 ----------------------- z^2 - 1.973 z + 0.998 Sample time: 0.005 seconds Discrete-time transfer function.
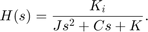
連続時間モデルと離散時間モデルのボード線図を比較します。
bodeplot(H,'-',Hd,'--') legend('Continuous-time','Discrete-time')
離散システムを解析するには、そのステップ応答をプロットします。
stepplot(Hd)

ステップ応答には大きな振幅があります。これはおそらく減衰が小さいためです。システムの開ループ極の減衰を確認します。
damp(Hd)
Pole Magnitude Damping Frequency Time Constant
(rad/seconds) (seconds)
9.87e-01 + 1.57e-01i 9.99e-01 6.32e-03 3.16e+01 5.00e+00
9.87e-01 - 1.57e-01i 9.99e-01 6.32e-03 3.16e+01 5.00e+00
予想したとおり、極は小さな等価の減衰率をもち、単位円の近くにあります。したがって、システムの減衰を増加させる補償器を設計しなければなりません。
補償器のゲインの追加
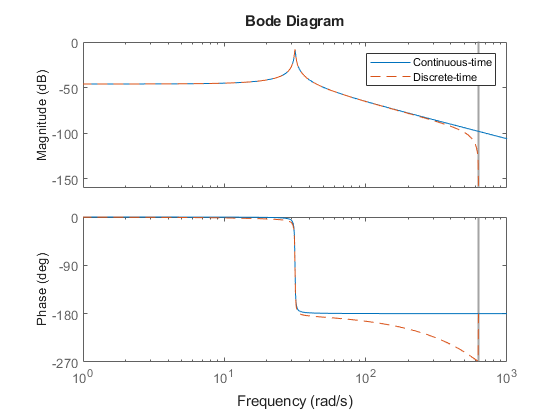
最も簡単な補償器は、極や零点をもたないゲイン係数です。根軌跡法を使用して、適切なフィードバック ゲインを選択してみてください。根軌跡は、閉ループ極の軌跡をフィードバック ゲインの関数としてプロットします。
rlocus(Hd)
極は急激に単位円から離れて不安定になります。したがって、システムに進みを導入しなければなりません。
リード ネットワークの追加
 に零点をもち、
に零点をもち、 に極をもつ進み補償器を定義します。
に極をもつ進み補償器を定義します。

D = zpk(0.85,0,1,Ts);
対応する開ループ モデルは、補償器とプラントの直列接続です。
oloop = Hd*D
oloop =
6.2328e-05 (z+0.9993) (z-0.85)
------------------------------
z (z^2 - 1.973z + 0.998)
Sample time: 0.005 seconds
Discrete-time zero/pole/gain model.
進み補償器が開ループ周波数応答に与える影響を確認するには、Hd と oloop のボード線図を比較します。
bodeplot(Hd,'--',oloop,'-') legend('Plant','Plant plus lead compensator')
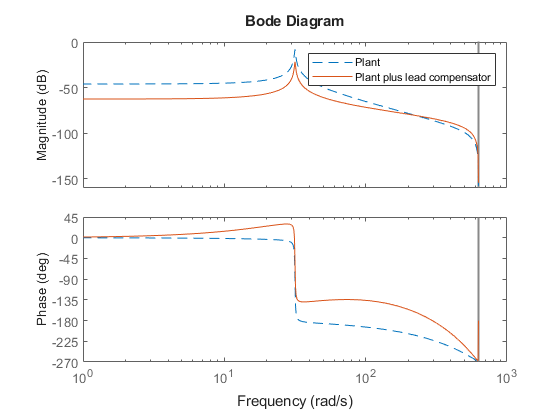
補償器がシステムに進みを追加し、それによって位相応答が周波数範囲  で上方向にシフトします。
で上方向にシフトします。
根軌跡プロットを使用して、閉ループ システムの極の動作を調べます。x 軸と y 軸の両方の範囲を -1 ~ 1 に設定します。
rlocus(oloop) grid xlim([-1 1]) ylim([-1 1])
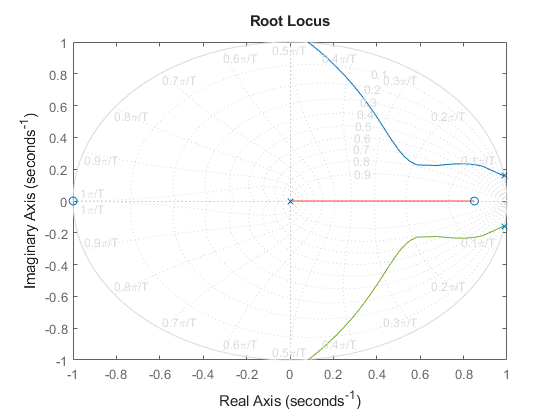
すると、閉ループ極はある程度の間、単位円内に留まります。
プロットのデータ マーカーを作成するには、根軌跡の曲線をクリックします。マーカーをドラッグして、曲線上で減衰が最大になる点を見つけます。0.782 の最大減衰は、4.07e+03 のフィードバック ゲインに対応します。

設計の解析
この設計を解析するには、まずフィードバック ゲインが 4.07e+03 の開ループ システムで構成される閉ループ システムを定義します。

k = 4.07e+03; cloop = feedback(oloop,k);
閉ループのステップ応答をプロットします。
stepplot(cloop)

この応答は、閉ループ設定点によって異なります。ここで示すものは、比較的速く、約 0.06 秒で落ち着きます。したがって、この閉ループ ディスク ドライブ システムの探索時間は 0.06 秒です。今日の標準から見るとこの探索時間は比較的遅いものですが、ここでは若干減衰したシステムを使用しています。
設計のロバスト性を調査することを推奨します。これを行うには、システムのゲイン余裕と位相余裕を計算します。まず、補償器、プラント、フィードバック ゲインを直列に接続して、単一フィードバックの開ループ システムを作成します。
olk = k*oloop;
次に、この開ループ モデルの余裕を計算します。
[Gm,Pm,Wcg,Wcp] = margin(olk)
Gm =
3.8360
Pm =
43.3061
Wcg =
296.7988
Wcp =
105.4736
このコマンドはゲイン余裕 Gm、位相余裕 Pm、およびそのそれぞれの交差周波数 Wcg と Wcp を返します。
ゲイン余裕を dB に変換します。
20*log10(Gm)
ans = 11.6776
余裕をグラフィカルに表示することもできます。
margin(olk)
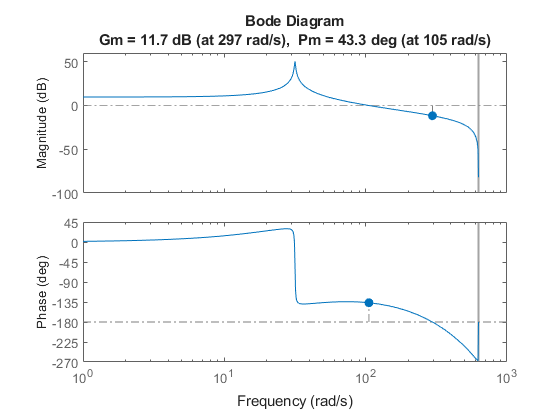
この設計はロバストであり、開ループ システムで 11 dB のゲインの増加または 40 度の位相遅れを不安定にならずに許容します。この設計の手順を続けることで、開ループ システムを安定化し、探索時間をさらに短縮する補償器を見つけられる場合があります。