このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
ゲイン スケジューリング
非線形プラントのゲイン スケジュール コントローラーの調整
ゲイン スケジュール コントローラーは、そのゲインが時間、操作条件またはプラント パラメーターの関数として自動的に調整されるコントローラーです。ゲイン スケジューリングは、ダイナミクスが時間や操作条件とともに変化する制御システムによく使われる手法です。こうしたシステムには、線形パラメーター変動 (LPV) システムや、非線形システムの大きなクラスが含まれます。MATLAB® または Simulink® でゲイン スケジュール コントローラーを調整するには、tunableSurface コマンドを使って可変のゲインをスケジューリング変数の関数として表現します。ゲイン スケジュール コントローラーを調整するワークフローの概要については、ゲイン スケジューリングの基礎を参照してください。
関数
ブロック
トピック
ゲイン スケジュール制御システム
- ゲイン スケジューリングの基礎
ゲイン スケジューリングは、システムの異なる操作点で、各々が十分な制御を提供する線形コントローラー群を用いた、非線形システムを制御するアプローチです。 - Simulink でのゲイン スケジュール制御システムのモデル化
Simulink で、ルックアップ テーブル、内挿ブロック、または MATLAB Function ブロックを使用してゲイン スケジュールをモデル化する。
ゲイン スケジュールの調整
- Simulink でのゲイン スケジュールの調整
systuneを使用してゲイン スケジュール コントローラーを調整する一般的な調整ワークフローを理解する。 - ゲイン スケジュール コントローラー調整のプラント モデル
ゲイン スケジュール制御システムを調整するには、選択した設計点でのプラント ダイナミクスを表す線形モデルの集合が必要です。 - slTuner インターフェイスでの複数の設計点
ゲイン スケジュール制御システムを調整する場合、線形プラント モデル群を Simulink モデルへのslTunerインターフェイスに関連付ける。 - ゲイン スケジュールのパラメーター化
ゲイン曲面は、スケジューリング変数における変数ゲインをパラメーター化します。ゲイン曲面を使用して、ゲイン スケジュール制御システムで変数ゲインをモデル化します。 - 操作条件による要件の変更
ゲイン スケジュール コントローラーを調整する場合、スケジューリング変数によって変わる調整目的を指定できます。 - ゲイン スケジュール制御システムの検証
ゲイン スケジュール コントローラーの調整が適切なパフォーマンスを保証するのは、各設計点の近傍でのみです。操作条件の全範囲の調整結果を検証することが重要です。
HL-20 自動操縦のケース スタディ
- HL-20 機体の平衡化と線形化
ゲイン スケジュール制御設計に使用する設計点の配列で機体モデルを線形化する。 - HL-20 の自動操縦における角速度の制御
HL-20 機体モデルの内側のループ用にゲイン スケジュール PI コントローラーを調整する。 - HL-20 の自動操縦の姿勢制御 - SISO 設計
機体のロール、ピッチ、およびヨーを制御するためのゲイン スケジュール SISO アーキテクチャを調整する。 - HL-20 の自動操縦の姿勢制御 - MIMO 設計
機体のロール、ピッチ、およびヨーを制御するためのゲイン スケジュール MIMO アーキテクチャを調整する。 - HL-20 の自動操縦を調整するための MATLAB ワークフロー
HL-20 機体用のゲイン スケジュール制御システムを MATLAB で設計する。
注目の例

複数操作点用の PID コントローラー群の設計
非線形 Simulink モデルが幅広い操作条件にわたり動作する場合、複数のモデル操作点に対する PID コントローラーの配列を設計できます。

化学反応器のゲイン スケジュール制御
この例では、化学反応器の低変換率から高変換率への遷移のためのゲイン スケジュール コントローラーの調整方法を示します。
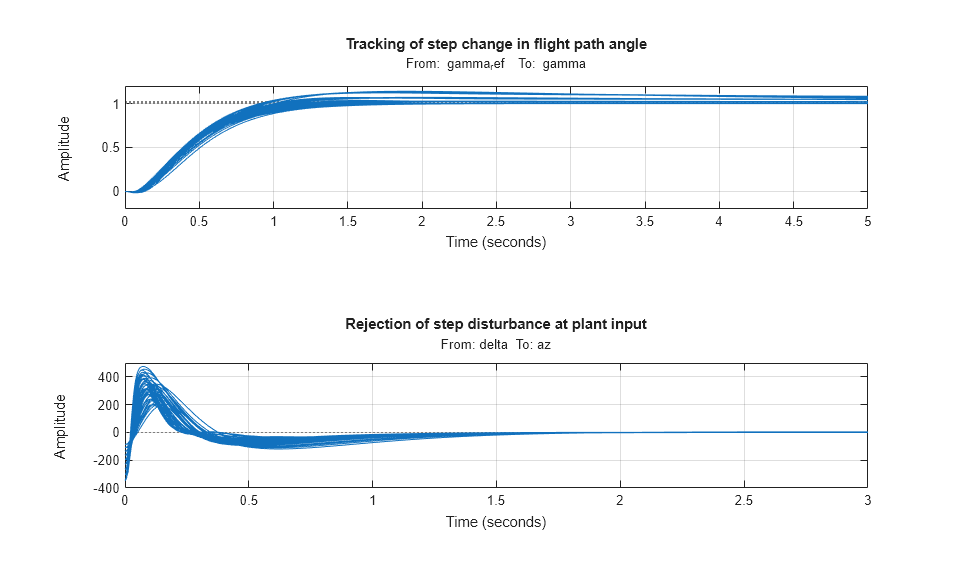
ゲイン スケジュール 3 ループ自動操縦の調整
この例では systune を使用して、Simulink でモデル化される制御システム向けに操作条件の 2 次元グリッドの滑らかなゲイン スケジュールを生成します。