このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
rlocusplot
動的システムの根軌跡プロット
説明
rlocusplot 関数は、動的システム モデルの根軌跡をプロットし、RLocusPlot チャート オブジェクトを返します。プロットをカスタマイズするには、ドット表記を使用してチャート オブジェクトのプロパティを変更します。詳細については、コマンド ラインでの線形解析プロットのカスタマイズを参照してください。
フィードバック ゲインと複素根の位置を取得するには、rlocus 関数を使用します。
作成
構文
説明
rlp = rlocusplot(sys)sys の根軌跡をプロットし、対応するチャート オブジェクトを返します。
プロットが滑らかになるように、rlocusplot 関数は自動的に正のフィードバック ゲインの集合を選択します。
rlp = rlocusplot(___,k)k で指定されたフィードバック ゲインの応答をプロットします。周波数範囲または周波数のベクトルを指定できます。k は、前述の構文の任意の入力引数の組み合わせとともに使用できます。
rlp = rlocusplot(___,plotoptions)plotoptions で指定されたプロット オプションを使用して根軌跡をプロットします。plotoptions に指定する設定は、現在の MATLAB® セッションのプロット基本設定をオーバーライドします。
rlp = rlocusplot(parent,___)Figure や TiledChartLayout などの指定された親グラフィックス コンテナーに極と零点をプロットし、Parent プロパティを設定します。指定された開いている Figure にプロットを作成する場合、または App Designer でアプリを作成する場合に、この構文を使用します。
入力引数
プロパティ
オブジェクト関数
addResponse | Add dynamic system response to existing response plot |
例
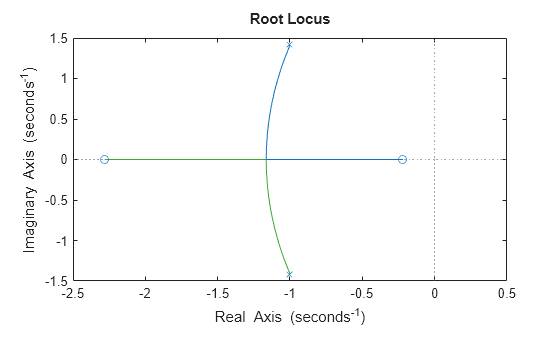
SISO 動的システム モデルの根軌跡をプロットします。
sys = tf([2 5 1],[1 2 3]); rlp = rlocusplot(sys);
詳細
ヒント
rlocusplotを使用して作成されたプロットは、string 配列または文字ベクトルの cell 配列として指定された、複数行のタイトルやラベルをサポートしません。複数行のタイトルやラベルを指定するには、newline文字を含む単一の string を使用します。rlocusplot(sys) title("first line" + newline + "second line");