LQG レギュレーターの設計
LQG 設計の例として、次の制御問題について考えます。
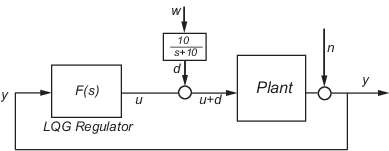
目標は、プラント出力 y をゼロ近傍で調節することです。入力外乱 d は、10 rad/s 未満に集中したパワー スペクトル密度 (PSD) を含む低周波です。次の図に示すように、LQG 設計用に、カットオフ 10 rad/s のローパス フィルターがホワイト ノイズで励起されるとしてモデル化されています。

設計を簡単にするために、このノイズは分散が 1 のガウスのホワイト ノイズとしてモデル化されています。
次の図は、整形フィルターのボード振幅を示します。
ローパス フィルターのボード振幅
次の式で与えられる強度を含む測定ノイズ n が存在します。
以下のコスト関数を使用して、
レギュレーションの性能と制御のコストのトレードオフを指定します。次の方程式は、開ループの状態空間モデルを表します。
ここで、(A、B、C) は の状態空間実現です。
次のコマンドは、この問題に対するオプションの LQG レギュレーター F(s) を設計します。
sys = ss(tf(100,[1 1 100])) % State-space plant model % Design LQ-optimal gain K K = lqry(sys,10,1) % u = -Kx minimizes J(u) % Separate control input u and disturbance input d P = sys(:,[1 1]); % input [u;d], output y % Design Kalman state estimator Kest. Kest = kalman(P,1,0.01) % Form LQG regulator = LQ gain + Kalman filter. F = lqgreg(Kest,K)
これらのコマンドは、LQG レギュレーター F(s) の状態空間モデル F を出力します。関数 lqry、kalman、lqgreg を離散プラントに適用した場合は、離散時間 LQG が設計されます。
設計を検証するために、関数 feedback でループを閉じて、閉ループ システムでローパス フィルターを作成して追加し、関数 impulse を使用して、開ループと閉ループのインパルス応答を比較します。
% Close loop
clsys = feedback(sys,F,+1)
% Note positive feedback.
% Create the lowpass filter and add it in series with clsys.
s = tf('s');
lpf= 10/(s+10) ;
clsys_fin = lpf*clsys;
% Open- vs. closed-loop impulse responses
impulse(sys,'r--',clsys_fin,'b-')
これらのコマンドでは、この例の開ループと閉ループのインパルス応答を比較する次の図が生成されます。
開ループと閉ループのインパルス応答の比較