lqgreg
線形 2 次ガウシアン (LQG) レギュレーターの作成
構文
rlqg = lqgreg(kest,k)
rlqg = lqgreg(kest,k,controls)
説明
rlqg = lqgreg(kest,k) は、カルマン推定器 を kest、状態フィードバック ゲイン行列を k として、LQG レギュレーター rlqg (状態空間モデル) を返します。同じ関数で、連続時間と離散時間の両方の場合が処理されます。kest と k の設計には同じツールを使用してください。
連続プラントの連続レギュレーター:
lqrまたはlqryおよびkalmanを使用離散プラントの離散レギュレーター:
dlqrまたはlqryおよびkalmanを使用連続プラントの離散レギュレーター:
lqrdとkalmdを使用
離散時間の場合、lqgreg が
レギュレーター を生成するのは、
kestが "現在の" カルマン推定器の場合レギュレーター を生成するのは、
kestが "遅延" カルマン推定器の場合
カルマン推定器の詳細は、kalman のリファレンス ページを参照してください。
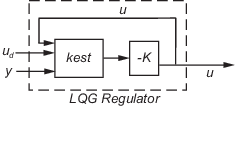
rlqg = lqgreg(kest,k,controls) は、追加の既知のプラント入力 ud にアクセスする推定器を扱います。インデックス ベクトル controls は、推定器のどの入力が制御する u かを指定します。また、結果の LQG レギュレーター rlqg は ud および y を入力にもちます (次の図を参照)。
メモ
LQG レギュレーターをプラントに接続する際には、必ず正のフィードバックを使用してください。
例
LQG レギュレーター: 圧延機のケース スタディの例を参照してください。
アルゴリズム
lqgreg は kalman で設計したカルマン推定器と lqr、dlqr または lqry で設計した最適状態フィードバック ゲインを接続することで、線形 2 次ガウシアン (LQG) レギュレーターを作成します。LQG レギュレーターは、レギュレーションの性能と制御のトレードオフを行うある 2 次コスト関数を最小化します。このレギュレーターはダイナミックで、安定化指令を生成するノイズの測定値に依存します。
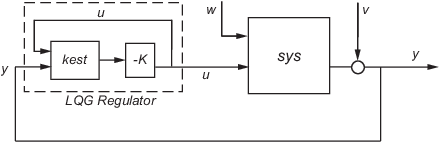
連続時間では、LQG レギュレーターは次の指令値を生成します。
ここで、 はカルマン状態推定です。レギュレーターの状態空間方程式は以下のとおりです。
ここで y はプラント出力測定量のベクトルです (背景と表記については、kalman を参照)。以下の図は、プラントに対するダイナミック レギュレーターを示しています。
離散時間の場合は、y[n–1] までの測定値に基づいた x[n] の遅延状態推定 か、y[n] を含む使用可能なすべての測定値に基づいた現在の状態推定 のいずれかを使用して LQG レギュレーターを作成できます。レギュレーター
は常に適切に定義されていますが、"現在のレギュレーター"
は I-KMD が可逆の場合にのみ因果的になります (表記については kalman を参照)。さらに現在のレギュレーターを実際に実装した場合は、測定値 y[n] が使用可能になった後の u[n] の計算するための時間が必要です (これがフィードバック ループのむだ時間になります)。
方程式をもつ離散時間プラントの場合:
"現在の" カルマン推定器を LQR ゲインに連結するのが最適であるのは、 であり、かつ y[n] が w[n] に依存しない (H = 0) 場合のみです。これらの条件が満たされない場合、lqg を使用して最適な LQG コントローラーを計算してください。
バージョン履歴
R2006a より前に導入