pidtune
線形プラント モデルのための PID 調整アルゴリズム
構文
説明
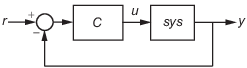
C = pidtune(sys,type)sys 用に type タイプの PID コントローラーを設計します。type で 1 自由度 (1-DOF) の PID コントローラーを指定した場合、コントローラーは次に示すような単一フィードバック ループ用に設計されます。
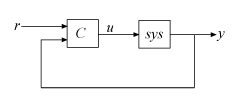
type で 2 自由度 (2-DOF) の PID コントローラーを指定した場合、pidtune によって次の図のフィードバック ループのような 2-DOF コントローラーが設計されます。
pidtune は PID コントローラー C のパラメーターを調整し、パフォーマンス (応答時間) とロバスト性 (安定余裕) のバランスを取ります。
C = pidtune(___,opts)pidtuneOptions を使用して、オプション セット opts を指定します。
例
この例では、以下で与えられるプラントの PID コントローラーを設計する方法を説明します。
第 1 段階として、プラントのモデルを作成して、このモデルの単純な PI コントローラーを設計します。
sys = zpk([],[-1 -1 -1],1);
[C_pi,info] = pidtune(sys,'PI')C_pi =
1
Kp + Ki * ---
s
with Kp = 1.14, Ki = 0.454
Continuous-time PI controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 0.5205
PhaseMargin: 60.0000
C_pi は、PI コントローラーを表す pid コントローラー オブジェクトです。info のフィールドは、調整アルゴリズムが約 0.52 rad/s の開ループ交差周波数を選択することを示しています。
コントローラー システムの閉ループのステップ応答 (設定値追従) を調べます。
T_pi = feedback(C_pi*sys, 1); step(T_pi)
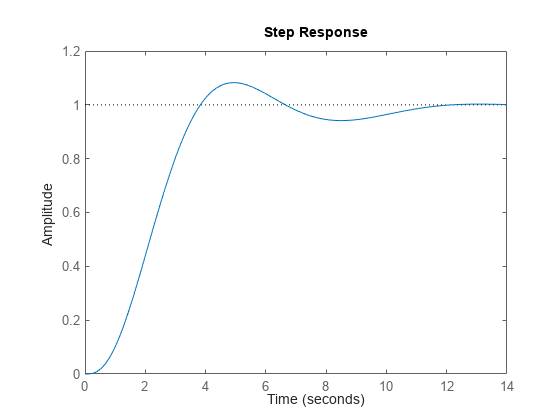
応答時間を改善するために、pidtune が自動的に選択する 0.52 という結果よりも高いターゲット交差周波数を設定できます。交差周波数を 1.0 に上げます。
[C_pi_fast,info] = pidtune(sys,'PI',1.0)C_pi_fast =
1
Kp + Ki * ---
s
with Kp = 2.83, Ki = 0.0495
Continuous-time PI controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 1
PhaseMargin: 43.9973
新しいコントローラーはより高い交差周波数を実現しますが、それにより位相余裕は小さくなります。
閉ループ ステップ応答を 2 つのコントローラーと比較します。
T_pi_fast = feedback(C_pi_fast*sys,1); step(T_pi,T_pi_fast) axis([0 30 0 1.4]) legend('PI','PI,fast')
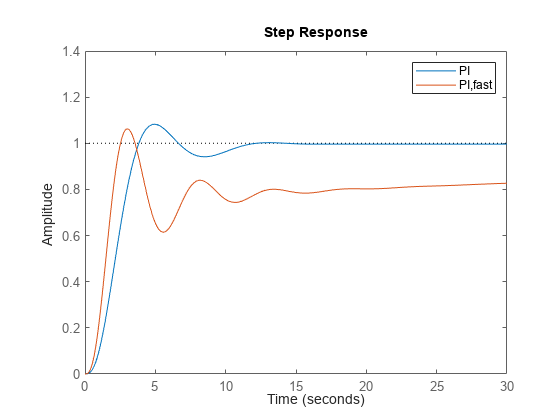
この性能低下は、PI コントローラーに 1.0 rad/s の交差周波数で十分な位相余裕を得るだけの自由度がないことにより起こります。微分動作を追加することで、応答を向上させることができます。
ターゲット交差周波数 1.0 rad/s をもつ Gc のための PIDF コントローラーを設計します。
[C_pidf_fast,info] = pidtune(sys,'PIDF',1.0)C_pidf_fast =
1 s
Kp + Ki * --- + Kd * --------
s Tf*s+1
with Kp = 2.72, Ki = 0.985, Kd = 1.72, Tf = 0.00875
Continuous-time PIDF controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 1
PhaseMargin: 60.0000
info のフィールドは、調整アルゴリズムが、コントローラーの微分動作により、十分な位相余裕のあるターゲット交差周波数を達成する、アグレッシブなコントローラーを設計できることを示しています。
閉ループ ステップ応答と外乱の抑制を、PI と PIDF の高速 コントローラーで比較します。
T_pidf_fast = feedback(C_pidf_fast*sys,1); step(T_pi_fast, T_pidf_fast); axis([0 30 0 1.4]); legend('PI,fast','PIDF,fast');
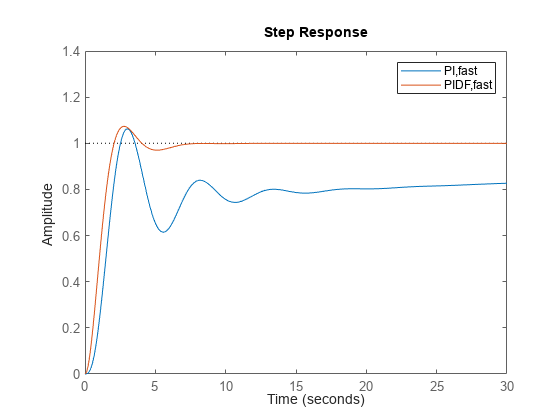
コントローラー システムの入力 (読み込み) 外乱の抑制を、PI と PIDF の高速 コントローラーで比較できます。これを行うには、プラント入力からプラント出力への閉ループ伝達関数の応答をプロットします。
S_pi_fast = feedback(sys,C_pi_fast); S_pidf_fast = feedback(sys,C_pidf_fast); step(S_pi_fast,S_pidf_fast); axis([0 50 0 0.4]); legend('PI,fast','PIDF,fast');
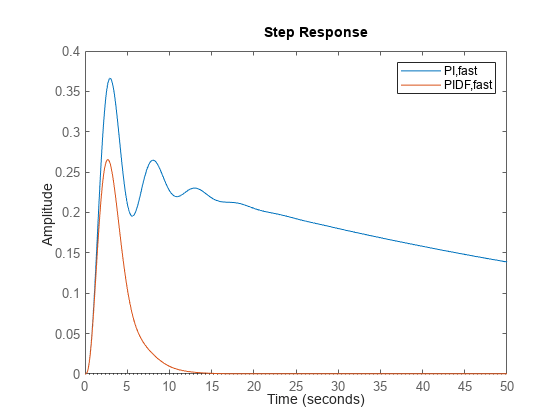
このプロットは、PIDF コントローラーが、より速い外乱の抑制を行うことも示しています。
次のプラントの PID コントローラーを標準形式で設計します。
標準形式でコントローラーを設計するには、標準形式のコントローラーを pidtune への C0 引数として使用します。
sys = zpk([],[-1 -1 -1],1); C0 = pidstd(1,1,1); C = pidtune(sys,C0)
C =
1 1
Kp * (1 + ---- * --- + Td * s)
Ti s
with Kp = 2.18, Ti = 2.57, Td = 0.642
Continuous-time PID controller in standard form
Model Properties
積分器を離散化するために、指定されたメソッドを使用して離散時間 PI コントローラーを設計します。
プラントが離散時間の場合は、pidtune は既定の前進オイラー積分法を使用して自動的に離散時間コントローラーを返します。別の積分手法を指定するには、pid または pidstd を使用して、目的の積分手法をもつ離散時間コントローラーを作成します。
sys = c2d(tf([1 1],[1 5 6]),0.1); C0 = pid(1,1,'Ts',0.1,'IFormula','BackwardEuler'); C = pidtune(sys,C0)
C =
Ts*z
Kp + Ki * ------
z-1
with Kp = -0.0658, Ki = 1.32, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time PI controller in parallel form.
Model Properties
C0 を入力して、pidtune で C0 と同じ形式、タイプ、離散化手法のコントローラー C を設計します。表示には、C の積分項で後退オイラー法の積分法が示されます。
台形則積分器を指定し、作成されたコントローラーを比較します。
C0_tr = pid(1,1,'Ts',0.1,'IFormula','Trapezoidal'); Ctr = pidtune(sys,C0_tr)
Ctr =
Ts*(z+1)
Ki * --------
2*(z-1)
with Ki = 1.32, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time I-only controller.
Model Properties
伝達関数によって与えられるプラントの 2-DOF PID コントローラーを設計します。
ターゲット帯域幅は 1.5 rad/s を使用します。
wc = 1.5;
G = tf(1,[1 0.5 0.1]);
C2 = pidtune(G,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
タイプ 'PID2' を使用すると、pidtune により 2-DOF コントローラーが生成され、pid2 オブジェクトとして表現されます。表示によりこの結果を確認します。表示にはまた、pidtune がすべてのコントローラー係数を、設定点の重み b および c を含めて調整し、性能とロバスト性のバランスを取っていることも示されます。
入力引数
出力引数
ヒント
既定では、
type入力をもつpidtuneは、pidコントローラーを並列形式で返します。標準形式でコントローラーを設計するには、入力引数C0としてpidstdを使用します。並列および標準コントローラー形式の詳細については、pidとpidstdのリファレンス ページを参照してください。ライブ エディターによる対話型の PID 調整については、[PID コントローラーの調整] ライブ エディター タスクを参照してください。このタスクを使用すると、PID コントローラーを対話的に設計し、ライブ スクリプト用の MATLAB® コードを自動的に生成できます。
アルゴリズム
MathWorks® PID 調整アルゴリズムについての詳細は、PID 調整アルゴリズムを参照してください。
代替機能
ライブ エディターによる対話型の PID 調整については、[PID コントローラーの調整] ライブ エディター タスクを参照してください。このタスクを使用すると、PID コントローラーを対話的に設計し、ライブ スクリプト用の MATLAB コードを自動的に生成できます。例については、ライブ エディターでの PID コントローラーの設計を参照してください。
スタンドアロン アプリによる対話型の PID 調整には、PID 調整器を使用します。アプリを使用したコントローラーの設計の例については、高速設定値追従用の PID コントローラーの設計を参照してください。
参照
[1] Åström, Karl J., and Tore Hägglund. Advanced PID Control. Research Triangle Park, NC: ISA-The Instrumentation, Systems, and Automation Society, 2006.
バージョン履歴
R2010b で導入