pid2
並列形式の 2-DOF PID コントローラー
説明
pid2 は、並列形式の 2 自由度 (2-DOF) の比例-積分-微分 (PID) コントローラー モデル オブジェクトを作成したり、動的システム モデルを並列 2-DOF PID コントローラー形式に変換したりする場合に使用します。
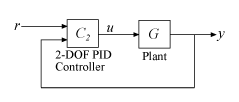
2-DOF PID コントローラーには、比例項および微分項に設定点の重みが含まれています。2-DOF PID コントローラーでは、外乱の抑制を、設定点の追従におけるオーバーシュートを大きく増加させることなく迅速に実行できます。2-DOF PID コントローラーはまた、制御信号に対する基準信号の変化の影響を緩和するためにも有用です。次の図では、2-DOF PID コントローラーを使用した典型的な制御アーキテクチャが示されています。
pid2 コントローラー モデル オブジェクトは、並列形式 PID コントローラーを連続時間または離散時間で表現できます。
連続時間 —
離散時間 —
ここで、以下となります。
b は比例項での設定点の重みです。
c は微分項での設定点の重みです。
Kp は比例ゲインです。
Ki は積分ゲインです。
Kd は微分ゲインです。
Tf は 1 次微分フィルター時定数です。
IF(z) は離散時間コントローラーで積分を計算するための積分手法です。
DF(z) は離散時間コントローラーで微分フィルターを計算するための積分手法です。
このオブジェクトを、制御アーキテクチャのプラント、アクチュエータ、センサーなど、他のコンポーネントと組み合わせて、制御システムを表すことができます。詳細については、モデル オブジェクトでの制御システム モデリングを参照してください。
コントローラーのパラメーターを直接指定するか、別のタイプのモデル (伝達関数モデル tf など) を PID コントローラー形式に変換して、PID コントローラー モデル オブジェクトを作成できます。
pid2 を使用して、一般化状態空間 (genss) モデルや不確かさをもつ状態空間 (uss (Robust Control Toolbox)) モデルを作成することもできます。
作成
pid2 コントローラー モデルは次のいずれかの方法で取得できます。
関数
pid2を使用してモデルを作成する。関数
pidtuneを使用して、プラント モデル用に PID コントローラーを調整する。関数pidtuneの引数typeで 2-DOF PID コントローラー タイプを指定して、並列形式 2-DOF PID コントローラーを取得する。以下に例を示します。sys = zpk([],[-1 -1 -1],1); C2 = pidtune(sys,'PID2');以下を使用して、プラント モデル用に PID コントローラーを対話的に調整する:
[PID コントローラーの調整] ライブ エディター タスク。
PID 調整器アプリ。
構文
説明
入力引数
出力引数
プロパティ
オブジェクト関数
以下のリストには、pid2 モデルで使用できる関数の代表的なサブセットが含まれています。一般に、動的システム モデルに適用できる関数はすべて、pid2 オブジェクトに適用できます。
例
比例ゲインと積分ゲイン、および微分項に対するフィルターをもつ連続時間 2-DOF コントローラーを作成します。これを行うには、積分ゲインを 0 に設定します。他のゲインとフィルター時定数を望ましい値に設定します。
Kp = 1; Ki = 0; % No integrator Kd = 3; Tf = 0.1; b = 0.5; % setpoint weight on proportional term c = 0.5; % setpoint weight on derivative term C2 = pid2(Kp,Ki,Kd,Tf,b,c)
C2 =
s
u = Kp (b*r-y) + Kd -------- (c*r-y)
Tf*s+1
with Kp = 1, Kd = 3, Tf = 0.1, b = 0.5, c = 0.5
Continuous-time 2-DOF PDF controller in parallel form.
Model Properties
表示では、コントローラー タイプ、式およびパラメーター値が示され、コントローラーに積分項のないことが確認されます。
台形則による離散化式を使用し、離散時間 2-DOF PI コントローラーを作成します。式は Name,Value 構文を使用して指定します。
Kp = 5; Ki = 2.4; Kd = 0; Tf = 0; b = 0.5; c = 0; Ts = 0.1; C2 = pid2(Kp,Ki,Kd,Tf,b,c,Ts,'IFormula','Trapezoidal')
C2 =
Ts*(z+1)
u = Kp (b*r-y) + Ki -------- (r-y)
2*(z-1)
with Kp = 5, Ki = 2.4, b = 0.5, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PI controller in parallel form.
Model Properties
Kd = 0 と設定すると、微分項のない PI コントローラーが指定されます。表示からわかるように、Tf と c の値はこのコントローラーでは使用されません。表示からは、積分器に台形公式が使用されていることもわかります。
2-DOF PID コントローラーを作成し、動的システムのプロパティ InputName および OutputName を設定します。入力と出力に名前を付けることが有用なのは、たとえば、PID コントローラーを他の動的システム モデルと connect コマンドを使用して相互接続する場合などです。
C2 = pid2(1,2,3,0,1,1,'InputName',{'r','y'},'OutputName','u')
C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 1, Ki = 2, Kd = 3, b = 1, c = 1
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
2-DOF PID コントローラーには 2 つの入力と 1 つの出力があります。したがって、'InputName' プロパティは各入力に対して 1 つずつ、2 つの名前を含む配列です。モデル表示では PID コントローラーの入力名と出力名は示されませんが、プロパティ値を調べて確認することはできます。たとえば、コントローラーの入力名を確認します。
C2.InputName
ans = 2×1 cell
{'r'}
{'y'}
配列の行については 1 ~ 2 の範囲の比例ゲインをもち、列については 5 ~ 9 の範囲の積分ゲインをもつ 2-DOF PI コントローラーの 2 行 3 列のグリッドを作成します。
PID コントローラーの配列を作成するには、ゲインを表す配列から開始します。
Kp = [1 1 1;2 2 2]; Ki = [5:2:9;5:2:9];
これらの配列を pid2 コマンドに渡すと、コマンドはコントローラーの配列を返します。
pi_array = pid2(Kp,Ki,0,0,0.5,0,'Ts',0.1,'IFormula','BackwardEuler'); size(pi_array)
2x3 array of 2-DOF PID controller. Each PID has 1 output and 2 inputs.
いくつかの係数にスカラー値を与えた場合、pid2 はそれらを自動的に拡張し、配列のすべてのエントリに同じ値を代入します。たとえば、この例では、配列のすべてのエントリが PI コントローラーになるよう、Kd = Tf = 0 とされます。また、配列のすべてのエントリで b = 0.5 となっています。
配列のエントリには、配列のインデックスを使用してアクセスします。動的システムの配列では、最初の 2 つの次元はモデルの I/O 次元、残りの次元は配列次元です。したがって、次のコマンドでは配列のエントリ (2,3) が抽出されます。
pi23 = pi_array(:,:,2,3)
pi23 =
Ts*z
u = Kp (b*r-y) + Ki ------ (r-y)
z-1
with Kp = 2, Ki = 9, b = 0.5, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PI controller in parallel form.
Model Properties
PID コントローラーの配列は、stack コマンドを使用しても作成できます。
C2 = pid2(1,5,0.1,0,0.5,0.5); % PID controller C2f = pid2(1,5,0.1,0.5,0.5,0.5); % PID controller with filter pid_array = stack(2,C2,C2f); % stack along 2nd array dimension
これらのコマンドは、コントローラーの 1 行 2 列の配列を返します。
size(pid_array)
1x2 array of 2-DOF PID controller. Each PID has 1 output and 2 inputs.
配列内の PID コントローラーはすべて、同じサンプル時間、離散積分器の式、および動的システムのプロパティ (InputName、OutputName など) をもっていなければなりません。
標準形式 pidstd2 コントローラーを並列形式に変換します。
標準 PID 形式では、コントローラーの動作は全体的な比例ゲイン Kp、積分器時定数 Ti と微分時定数 Td、そしてフィルター除数 N によって表現されます。どの 2-DOF 標準形式コントローラーも、pid2 コマンドを使用して並列形式に変換できます。たとえば、次の標準形式コントローラーを考えます。
Kp = 2; Ti = 3; Td = 4; N = 50; b = 0.1; c = 0.5; C2_std = pidstd2(Kp,Ti,Td,N,b,c)
C2_std =
1 1 s
u = Kp * [(b*r-y) + ---- * --- * (r-y) + Td * ------------ * (c*r-y)]
Ti s (Td/N)*s+1
with Kp = 2, Ti = 3, Td = 4, N = 50, b = 0.1, c = 0.5
Continuous-time 2-DOF PIDF controller in standard form
pid2 を使用してこのコントローラーを並列形式に変換します。
C2_par = pid2(C2_std)
C2_par =
1 s
u = Kp (b*r-y) + Ki --- (r-y) + Kd -------- (c*r-y)
s Tf*s+1
with Kp = 2, Ki = 0.667, Kd = 8, Tf = 0.08, b = 0.1, c = 0.5
Continuous-time 2-DOF PIDF controller in parallel form.
Model Properties
応答プロットにより、2 つの形式が等価であることが確認されます。
bodeplot(C2_par,'b-',C2_std,'r--') legend('Parallel','Standard','Location','Southeast')

微分フィルターをもつ 2-DOF PID コントローラーを表す離散時間動的システムを、並列 pid2 形式に変換します。
次の状態空間行列は、サンプル時間が 0.1 秒の離散時間 2-DOF PID コントローラーを表します。
A = [1,0;0,0.99]; B = [0.1,-0.1; -0.005,0.01]; C = [3,0.2]; D = [2.6,-5.2]; Ts = 0.1; sys = ss(A,B,C,D,Ts);
sys を 2-DOF PID 形式に変換した場合、その結果は、変換でどの離散積分器の式を指定するかに依存します。たとえば、既定の ForwardEuler を積分器と微分の両方で使用したとします。
C2fe = pid2(sys)
C2fe =
Ts 1
u = Kp (b*r-y) + Ki ------ (r-y) + Kd ----------- (c*r-y)
z-1 Tf+Ts/(z-1)
with Kp = 5, Ki = 3, Kd = 2, Tf = 10, b = 0.5, c = 0.5, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PIDF controller in parallel form.
Model Properties
ここで、Trapezoidal 式を使用して変換を行います。
C2trap = pid2(sys,'IFormula','Trapezoidal','DFormula','Trapezoidal')
C2trap =
Ts*(z+1) 1
u = Kp (b*r-y) + Ki -------- (r-y) + Kd ------------------- (c*r-y)
2*(z-1) Tf+Ts/2*(z+1)/(z-1)
with Kp = 4.85, Ki = 3, Kd = 2, Tf = 9.95, b = 0.485, c = 0.5, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PIDF controller in parallel form.
Model Properties
表示には、結果として得られる係数値と関数形式に相違があることが示されます。
連続時間 2-DOF PID コントローラーを離散化し、積分フィルターと微分フィルターの式を指定します。
連続時間コントローラーを作成し、c2d コマンドのゼロ次ホールド メソッドを使用してこれを離散化します。
C2con = pid2(10,5,3,0.5,1,1); % continuous-time 2-DOF PIDF controller C2dis1 = c2d(C2con,0.1,'zoh')
C2dis1 =
Ts 1
u = Kp (b*r-y) + Ki ------ (r-y) + Kd ----------- (c*r-y)
z-1 Tf+Ts/(z-1)
with Kp = 10, Ki = 5, Kd = 3.31, Tf = 0.552, b = 1, c = 1, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PIDF controller in parallel form.
Model Properties
表示には、離散時間コントローラーの新しい PID 係数についての c2d による計算が示されます。
離散化されたコントローラーの離散化積分器の式は、ヒントで説明されているように、c2d の離散化手法に依存します。zoh メソッドでは、IFormula と DFormula のどちらも ForwardEuler です。
C2dis1.IFormula
ans = 'ForwardEuler'
C2dis1.DFormula
ans = 'ForwardEuler'
c2d によって返された式の中から異なるものを複数使用する場合、コントローラーの Ts、IFormula、および DFormula プロパティを望ましい値に直接設定できます。
C2dis2 = C2con; C2dis2.Ts = 0.1; C2dis2.IFormula = 'BackwardEuler'; C2dis2.DFormula = 'BackwardEuler';
ただし、これらのコマンドは、離散化されたコントローラーの新しい PID ゲインは計算しません。これを確認するには、C2dis2 を調べ、その係数を C2con および C2dis1 と比較します。
C2dis2
C2dis2 =
Ts*z 1
u = Kp (b*r-y) + Ki ------ (r-y) + Kd ------------- (c*r-y)
z-1 Tf+Ts*z/(z-1)
with Kp = 10, Ki = 5, Kd = 3, Tf = 0.5, b = 1, c = 1, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PIDF controller in parallel form.
Model Properties
ヒント
2-DOF コントローラーを 2 つの SISO 制御コンポーネント (フィードバック コントローラーとフィードフォワード コントローラーなど) に分割するには、
getComponentsを使用します。以下のようにして、
pid2コントローラー オブジェクトの配列を作成します。係数
Kp、Ki、Kd、Tf、bおよびcの 1 つ以上について、配列値を指定する。動的システム
sysの配列を指定し、pid2コントローラー オブジェクトに変換する。stackを使用して、個々のコントローラーまたはより小さい配列から配列を作成する。プラント モデルの配列を
pidtuneに渡す。
pid2コントローラーの配列では、各コントローラーに同じサンプル時間Tsと、離散積分器の式IFormulaおよびDFormulaがなければなりません。標準形式コントローラーを作成するか、標準形式コントローラーに変換するには、
pidstd2を使用します。標準形式では、コントローラーの動作は全体的な比例ゲイン Kp、積分時間 Ti と微分時間 Td、そしてフィルター除数 N によって表現されます。たとえば、連続時間標準形式 2-DOF PID コントローラーの入力と出力間の関係は、次の式で与えられます。連続時間
pid2コントローラーを離散化するには、以下の 2 つの方法があります。c2dを使用します。c2dは離散化されたコントローラーのための新しいパラメーター値を計算します。離散化されたコントローラーの離散積分器の式は、次の表に示すように、使用するc2d離散化手法に依存します。c2d離散化手法IFormulaDFormula'zoh'ForwardEulerForwardEuler'foh'TrapezoidalTrapezoidal'tustin'TrapezoidalTrapezoidal'impulse'ForwardEulerForwardEuler'matched'ForwardEulerForwardEulerc2d離散化手法の詳細については、c2dのリファレンス ページを参照してください。IFormulaとDFormulaの詳細については、プロパティを参照してください。他の離散積分器の式が必要な場合は、
Ts、IFormula、およびDFormulaを目標値に直接設定してコントローラーを離散化することができます。(連続時間 2-DOF PID コントローラーの離散化を参照。)ただし、この方法では離散化されたコントローラーの新しいゲインとフィルター定数値は計算されません。したがって、この方法で得られる連続時間と離散時間のpid2コントローラーの一致は、c2dを使用した場合に比べて劣る可能性があります。
バージョン履歴
R2015b で導入
参考
pidstd2 | pid | piddata2 | getComponents | make1DOF | pidtune | pidTuner | tunablePID2 | genss | realp