d2c
離散時間から連続時間へモデルを変換
説明
例
次の離散時間伝達関数を作成します。
H = tf([1 -1],[1 1 0.3],0.1);
モデルのサンプル時間は です。
連続時間のゼロ次ホールドと等価のモデルを派生させます。
Hc = d2c(H)
Hc = 121.7 s + 1.758e-12 --------------------- s^2 + 12.04 s + 776.7 Continuous-time transfer function. Model Properties
結果のモデル Hc を既定のゼロ次ホールド メソッドとサンプル時間 0.1 秒で離散化し、元の離散モデル H を返します。
c2d(Hc,0.1)
ans =
z - 1
-------------
z^2 + z + 0.3
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Tustin 近似法を使用して H を連続時間モデルに変換します。
Hc2 = d2c(H,'tustin');結果のモデル Hc2 を離散化し、元の離散時間モデル H を取り戻します。
c2d(Hc2,0.1,'tustin');離散時間伝達関数モデルを推定し、連続時間モデルに変換します。
load iddata1 sys1d = tfest(z1,2,'Ts',0.1); sys1c = d2c(sys1d,'zoh');
連続時間伝達関数モデルを推定します。
sys2c = tfest(z1,2);
sys1c の応答と、直接推定した連続時間モデル sys2c を比較します。
compare(z1,sys1c,sys2c)
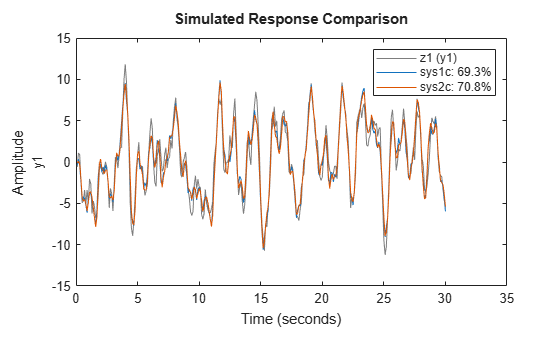
この 2 つのシステムはほぼ同じです。
同定された離散時間伝達関数モデルを連続時間に変換します。
load iddata1 sysd = tfest(z1,2,'Ts',0.1); sysc = d2c(sysd,'zoh');
sys1c には共分散情報がありません。d2c 演算により、同定されたモデルの共分散データが失われることになります。
同じ推定コマンドと推定データでゼロ点の反復更新を使用して、共分散情報を再生成します。
opt = tfestOptions; opt.SearchOptions.MaxIterations = 0; sys1c = tfest(z1,sysc,opt);
周波数応答の不確かさへの影響を解析します。
h = bodeplot(sysd,sys1c); showConfidence(h,3)
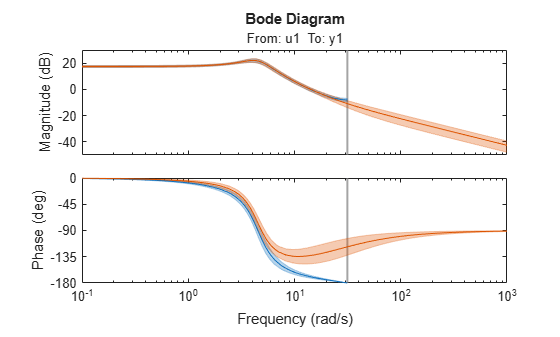
sys1c と sysd の不確かさはナイキスト周波数に匹敵します。ただし、sys1c では、推定データによる情報が得られないため、周波数範囲の不確かさが大きくなります。
推定データにアクセスできない場合は、translatecov コマンドを使用します。これは、ガウス近似の公式に基づいた、モデル タイプ変換演算全体での共分散の変換です。
入力引数
出力引数
参照
[1] Franklin, G.F., Powell,D.J., and Workman, M.L., Digital Control of Dynamic Systems (3rd Edition), Prentice Hall, 1997.
[2] Kollár, I., G.F. Franklin, and R. Pintelon, "On the Equivalence of z-domain and s-domain Models in System Identification," Proceedings of the IEEE® Instrumentation and Measurement Technology Conference, Brussels, Belgium, June, 1996, Vol. 1, pp. 14-19.
バージョン履歴
R2006a より前に導入
参考
d2cOptions | c2d | translatecov (System Identification Toolbox) | logm | モデル レートの変換