linearize
Simulink モデルまたはサブシステムの線形近似
構文
説明
linsys = linearize(___,StateOrder=stateorder)
例
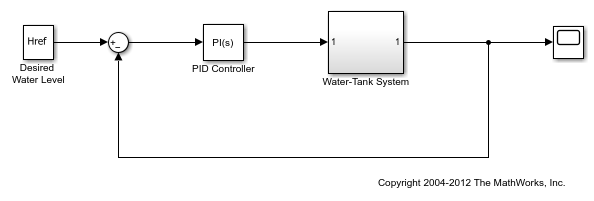
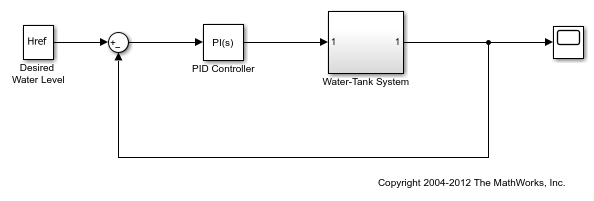
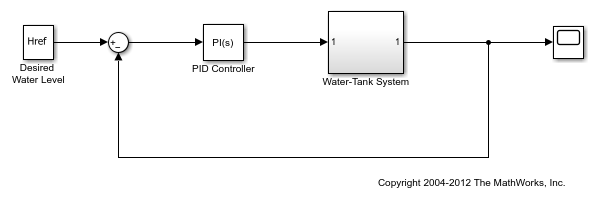
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)

PID Controller ブロックの出力で、線形化入力を指定します。これは Water-Tank System ブロックの入力信号です。
io(1) = linio('watertank/PID Controller',1,'input');
Water-Tank System ブロックの出力ポイントで、線形化出力ポイントを指定します。出力ポイントを開ループとして指定することで、モデルの操作点を変更せずに、線形化に対するフィードバック信号の影響が取り除かれます。
io(2) = linio('watertank/Water-Tank System',1,'openoutput');
指定された I/O セットを使用してモデルを線形化します。
linsys = linearize(mdl,io);
linsys は、モデルの操作点でのプラントの線形近似です。
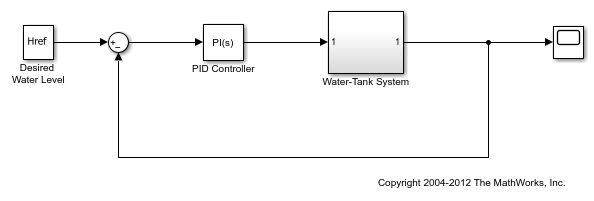
Simulink モデルを開きます。
mdl = 'magball';
open_system(mdl)
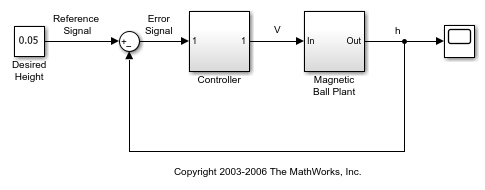
ボールの高さが 0.05 である定常状態の操作点を見つけます。既定の操作点の仕様を作成し、高さの状態を既知の値に設定します。
opspec = operspec(mdl); opspec.States(5).Known = 1; opspec.States(5).x = 0.05;
モデルを平衡化して操作点を見つけます。
options = findopOptions('DisplayReport','off'); op = findop(mdl,opspec,options);
線形化の入力および出力信号を指定して、閉ループ伝達関数を計算します。
io(1) = linio('magball/Desired Height',1,'input'); io(2) = linio('magball/Magnetic Ball Plant',1,'output');
指定された I/O セットを使用して、指定された操作点でモデルを線形化します。
linsys = linearize(mdl,io,op);
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
閉ループ伝達関数を計算するため、まず線形化の入力信号と出力信号を指定します。
io(1) = linio('watertank/PID Controller',1,'input'); io(2) = linio('watertank/Water-Tank System',1,'output');
sys を 10 秒間シミュレートして、モデルを線形化します。
linsys = linearize(mdl,io,10);
Simulink モデルを開きます。
mdl = 'scdcascade';
open_system(mdl)
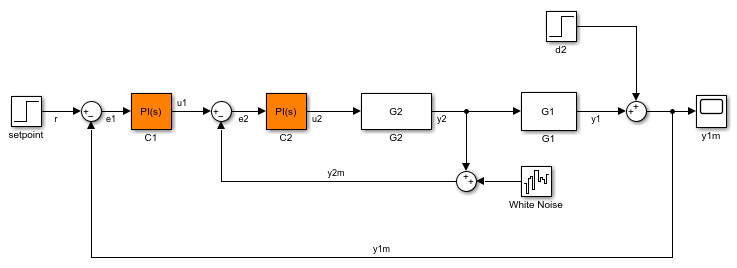
外側のループのコントローラー ゲイン Kp1 および Ki1 にパラメーターの変化を指定します。ゲイン値ごとにパラメーター グリッドを作成します。
Kp1_range = linspace(Kp1*0.8,Kp1*1.2,6); Ki1_range = linspace(Ki1*0.8,Ki1*1.2,4); [Kp1_grid,Ki1_grid] = ndgrid(Kp1_range,Ki1_range);
Name と Value のフィールドをもつパラメーター値構造体を作成します。
params(1).Name = 'Kp1'; params(1).Value = Kp1_grid; params(2).Name = 'Ki1'; params(2).Value = Ki1_grid;
params は、6 行 4 列のパラメーター値グリッドです。各グリッド点は、Kp1 および Ki1 の値の一意の組み合わせに対応します。
システムの閉ループ応答を計算するため、線形化の入力ポイントと出力ポイントを定義します。
io(1) = linio('scdcascade/setpoint',1,'input'); io(2) = linio('scdcascade/Sum',1,'output');
指定されたパラメーター値を使用してモデルの操作点でモデルを線形化します。
linsys = linearize(mdl,io,params);
Simulink モデルを開きます。
mdl = 'scdpwm';
open_system(mdl)
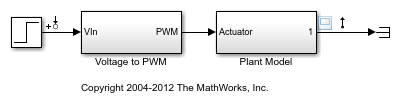
モデルから線形化の入力と出力を抽出します。
io = getlinio(mdl);
モデルの操作点でモデルを線形化します。
linsys = linearize(mdl,io)
linsys =
D =
Step
Plant Model 0
Static gain.
Voltage to PWM ブロックの不連続性のため、モデルがゼロに線形化されます。線形化中にこのブロックが単位ゲインとして扱われるよう、このブロックに代替の線形化を指定します。
blocksub.Name = 'scdpwm/Voltage to PWM';
blocksub.Value = 1;
指定されたブロック置換を使用してモデルを線形化します。
linsys = linearize(mdl,blocksub,io)
linsys =
A =
State Space( State Space(
State Space( 0.9999 -0.0001
State Space( 0.0001 1
B =
Step
State Space( 0.0001
State Space( 5e-09
C =
State Space( State Space(
Plant Model 0 1
D =
Step
Plant Model 0
Sample time: 0.0001 seconds
Discrete-time state-space model.
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
Water-Tank System ブロックを線形化するため、線形化の入力と出力を指定します。
io(1) = linio('watertank/PID Controller',1,'input'); io(2) = linio('watertank/Water-Tank System',1,'openoutput');
線形化のオプション セットを作成し、線形化されるモデルのサンプル時間を指定します。
options = linearizeOptions('SampleTime',0.1);
指定されたオプションを使用してプラントを線形化します。
linsys = linearize(mdl,io,options)
linsys =
A =
H
H 0.995
B =
PID Controll
H 0.02494
C =
H
Water-Tank S 1
D =
PID Controll
Water-Tank S 0
Sample time: 0.1 seconds
Discrete-time state-space model.
線形化されたプラントは、サンプル時間 0.1 の離散時間状態空間モデルです。
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
線形化するブロックの絶対ブロック パスを指定します。
blockpath = 'watertank/Water-Tank System';
モデルの操作点で指定されたブロックを線形化します。
linsys = linearize(mdl,blockpath);
Simulink モデルを開きます。
mdl = 'magball';
open_system(mdl)
ボールの高さが 0.05 である定常状態の操作点を見つけます。既定の操作点の仕様を作成し、高さの状態を既知の値に設定します。
opspec = operspec(mdl); opspec.States(5).Known = 1; opspec.States(5).x = 0.05;
options = findopOptions('DisplayReport','off'); op = findop(mdl,opspec,options);
線形化するブロックのブロック パスを指定します。
blockpath = 'magball/Magnetic Ball Plant';
指定された操作点で、指定されたブロックを線形化します。
linsys = linearize(mdl,blockpath,op);
Simulink モデルを開きます。
mdl = 'magball';
open_system(mdl)
モデルの操作点でプラントを線形化します。
blockpath = 'magball/Magnetic Ball Plant';
linsys = linearize(mdl,blockpath);
線形化したプラントの既定の状態順序を表示します。
linsys.StateName
ans =
3×1 cell array
{'height' }
{'Current'}
{'dhdt' }
プラントを線形化し、線形化したモデルで状態の順序を並べ替えます。高さの変化率を 2 番目の状態に設定します。
stateorder = {'magball/Magnetic Ball Plant/height';...
'magball/Magnetic Ball Plant/dhdt';...
'magball/Magnetic Ball Plant/Current'};
linsys = linearize(mdl,blockpath,'StateOrder',stateorder);
新しい状態の順序を表示します。
linsys.StateName
ans =
3×1 cell array
{'height' }
{'dhdt' }
{'Current'}
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
閉ループ伝達関数を計算するため、まず線形化の入力信号と出力信号を指定します。
io(1) = linio('watertank/PID Controller',1,'input'); io(2) = linio('watertank/Water-Tank System',1,'output');
sys をシミュレートして 0 秒と 10 秒でモデルを線形化します。これらのスナップショット時間に対応する操作点を返します。これはモデルが線形化された操作点です。
[linsys,linop] = linearize(mdl,io,[0,10]);
Simulink モデルを開きます。
mdl = 'watertankNLModel';
open_system(mdl)水位の初期条件を指定します。
h0 = 10;
モデルの線形解析ポイントを指定します。
io(1) = linio('watertankNLModel/Step',1,'input'); io(2) = linio('watertankNLModel/H',1,'output');
モデルをシミュレートし、時間スナップショットで操作点を抽出します。
tlin = [0 30 40 50 60 70 80]; op = findop(mdl,tlin);
線形化時にオフセットを保存するには、線形化のオプション セットを作成して StoreOffsets を "struct" に設定します。これにより、linearize の info 出力引数に線形化のオフセットが返されます。
options = linearizeOptions(StoreOffsets="struct");指定された I/O ポイントとパラメーターの変化を使用して、平衡化した操作点でプラントをバッチ線形化します。
[linsys,~,info] = linearize(mdl,io,op,options); info.Offsets
ans=7×1 struct array with fields:
dx
x
u
y
OutputName
InputName
StateName
Ts
LPV System ブロックの構成時に info.Offsets のオフセットを使用できます。そのためには、getOffsetsForLPV関数を使用して、サポートされる形式でオフセットを抽出する必要があります。さらに、ssInterpolant関数を使用するときには、追加入力引数として info.Offsets を明示的に指定しなければなりません。
あるいは、線形化された ss モデルの Offsets プロパティにオフセットを直接保存できます。そのためには、StoreOffsets オプションを "system" に設定します。(R2025a 以降)
options.StoreOffsets = "system";
linsys2 = linearize(mdl,io,op,options);
linsys2.Offsetsans=7×1 struct array with fields:
dx
x
u
y
オフセットをシステムに直接保存すると、LPV モデリングのワークフローが簡略化され、Simulink® モデルの非線形応答と線形化された応答の比較が容易になります。このシステムを使用し、ssInterpolant を使用して線形パラメーター変動モデルを直接作成する方法の例については、バッチ線形化の結果からの LPV モデルの作成を参照してください。
R2025a 以降
この例では、バッチ線形化を使用するときに、状態の整合性が一様な状態空間モデルの配列を取得する方法を説明します。バッチ線形化を使用して取得した状態空間配列から線形パラメーター変動 (LPV) モデルを作成するには、線形化グリッド全体で、状態の次元、遅延モデリング、およびオフセットの処理が、整合性があり一様でなければなりません。
この例では、実体振子のモデルについて考えます。振子の角度の初期条件は、反時計回りに 45 度で、加えられるトルクはゼロです。さらに、振子の角速度の初期条件は 0 deg/s です。パラメーターを指定してモデルを読み込みます。
tau0 = 0;
mgl = 1;
inv_inert = 1;
c = 0.1;
theta0 = pi/4;
dtheta0 = 0;
mdl = "scdPendulumNoWrap";
load_system(mdl);この例では、Saturation ブロックをゲインとして扱わないように線形化を設定します。このモデルの Saturation ブロックは合計トルクの入力を -1 ~ 1 の値に制限します。したがって、信号入力値がこの範囲外の場合、線形化ではこのブロックを解析的にゼロに線形化します。
set_param(mdl+"/clip","LinearizeAsGain","off");
Saturation ブロックの入力を線形化入力に、theta を出力に指定します。
io(1) = linio(mdl+"/tau0",1,"input"); io(2) = linio(mdl+"/pendulum",1,"output");
線形化のために、2 つの操作点を作成します。2 番目の操作点では、飽和の範囲外にある入力レベルを指定します。
op1 = operpoint(mdl); op2 = copy(op1); op2.Inputs(1).u = 2; op = [op1,op2];
まず、BatchConsistency オプションを false に設定してシステムを線形化します。
lin_opt = linearizeOptions( ... StoreOffsets="system", ... BlockReduction="on", ... BatchConsistency=false); sys = linearize(mdl,io,op,lin_opt); sys
sys(:,:,1,1) =
A =
theta theta_dot
theta 0 1
theta_dot -0.7071 -0.1
B =
tau0
theta 0
theta_dot 1
C =
theta theta_dot
pendulum/the 1 0
D =
tau0
pendulum/the 0
sys(:,:,2,1) =
D =
tau0
pendulum/the 0
2x1 array of continuous-time state-space models.
Model Properties
バッチの線形化の結果は、定義した操作点に対応する 2 行 1 列の状態空間モデルの配列として返されます。配列内の最初のモデルには 2 つの状態がありますが、2 番目のモデルは、入力レベルが飽和の範囲外にあるため、ゼロに線形化されます。BatchConsistency が無効の場合、線形化では配列内の各モデルが可能な限り低次元化されます。
次に、BatchConsistency オプションを有効にし、同じ操作条件でモデルを再度線形化します。
lin_optc = linearizeOptions( ... StoreOffsets="system", ... BlockReduction="on", ... BatchConsistency=true); sysc = linearize(mdl,io,op,lin_optc); sysc
sysc(:,:,1,1) =
A =
theta theta_dot
theta 0 1
theta_dot -0.7071 -0.1
B =
tau0
theta 0
theta_dot 1
C =
theta theta_dot
pendulum/the 1 0
D =
tau0
pendulum/the 0
sysc(:,:,2,1) =
A =
theta theta_dot
theta 0 1
theta_dot -0.7071 -0.1
B =
tau0
theta 0
theta_dot 0
C =
theta theta_dot
pendulum/the 1 0
D =
tau0
pendulum/the 0
2x1 array of continuous-time state-space models.
Model Properties
このバッチ線形化では、両方のモデルが 2 つの状態をもつ配列が生成されます。BatchConsistency オプションを有効にすると、線形化ではバッチ線形化配列内の "すべて" のモデルの入出力マップに寄与しない状態と遅延のみを取り除くため、すべてのモデルについて整合性が保持されます。これは特に、グリッド付き LPV モデルを作成するときに役立ちます。
この振子の LPV モデルを作成する方法を示す例については、Create LPV Pendulum Model Using Batch Linearizationを参照してください。
R2025a 以降
この例では、離散化中に発生する追加の遅延をモデル化する方法を説明します。通常、モデルのサンプル時間の整数倍ではない入力遅延または出力遅延をもつモデルを離散化すると、離散の入力遅延と出力遅延のほかに追加の遅延が発生することがあります。linearize では、これらの遅延を内部遅延または追加の状態としてモデル化するかを指定できます。
2 つの状態と入力遅延 2.7 秒をもつ LTI システムを含むシンプルな Simulink® モデルを考えます。
sys = tf([1,2],[1,4,2],InputDelay=2.7);
mdl = "linDelayModeling";
load_system(mdl)サンプル時間 1 秒でモデルを線形化します。さらに、離散化方法を Tustin (双一次) に設定し、3 次 Thiran フィルターを指定して、非整数の遅延をモデル化します。
opt = linearizeOptions(... SampleTime=1,... UseExactDelayModel=true); opt.RateConversionOptions.Method = "tustin"; opt.RateConversionOptions.ThiranOrder = 3; linsys = linearize(mdl,opt)
linsys =
A =
? ? ? ? ?
? -0.4286 -0.5714 -0.00265 0.06954 2.286
? 0.2857 0.7143 -0.001325 0.03477 1.143
? 0 0 -0.2432 0.1449 -0.1153
? 0 0 0.25 0 0
? 0 0 0 0.125 0
B =
in
? 0.002058
? 0.001029
? 8
? 0
? 0
C =
? ? ? ? ?
out 0.2857 0.7143 -0.001325 0.03477 1.143
D =
in
out 0.001029
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
線形化により、3 次 Thiran フィルターに対応する 3 つの追加状態を含む離散化されたモデルが返されます。むだ時間をサンプル時間で除算すると 2.7 になるため、3 次 Thiran フィルターはむだ時間全体を近似できます。線形化オプション opt の opt.RateConversionOptions.DelayModeling プロパティは、追加の遅延をモデル化する方法を決定します。既定では、これは "state" に設定され、追加の遅延は追加の状態としてモデル化されます。代わりに追加の遅延を内部遅延としてモデル化するには、DelayModeling を "delay" に設定します。
opt.RateConversionOptions.DelayModeling = "delay";モデルを再度線形化します。
linsys2 = linearize(mdl,opt)
linsys2 =
A =
? ?
? -0.4286 -0.5714
? 0.2857 0.7143
B =
in
? 0.5714
? 0.2857
C =
? ?
out 0.2857 0.7143
D =
in
out 0.2857
(values computed with all internal delays set to zero)
Internal delays (sampling periods): 1 1 1
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
線形化では、追加の遅延を離散化モデルの内部遅延としてモデル化できるようになりました。
入力引数
出力引数
制限
ローカル ソルバーを使用するように構成されている参照モデルが含まれているモデルの階層構造では、線形化はサポートされていません。
ローカル ソルバーを使用するように構成されている Simscape™ ネットワークでは、線形化はサポートされていません。
詳細
アルゴリズム
代替方法
関数 linearize に替わる方法として、次のいずれかの方法でモデルを線形化することができます。
モデルを対話的に線形化するには、モデル線形化器アプリを使用します。例については、Simulink モデルのモデル操作点での線形化を参照してください。
伝達関数ごとにモデルを変更したり解析ポイント セットを作成することなく、複数の伝達関数を取得するには、
slLinearizerインターフェイスを使用します。例については、パラメーター値を変化させて複数の伝達関数を取得を参照してください。
ブロックごとの線形化は Simulink Control Design ソフトウェアと Simulink 関数 linmod の両方で実行されますが、Simulink Control Design の線形化機能ではより柔軟なユーザー インターフェイスが提供され、Control System Toolbox の数値アルゴリズムも使用されます。詳細については、Simulink Control Design を使用した線形化と Simulink を使用した線形化の比較を参照してください。