findop
仕様 (平衡化) またはシミュレーションからの定常状態の操作点を見つける
構文
説明
例
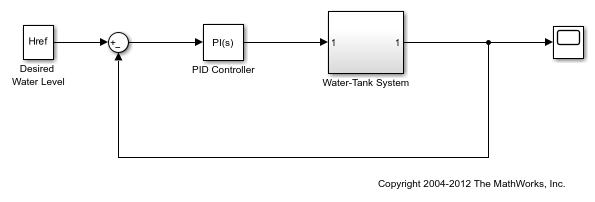
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
モデルを平衡化して水タンク水位が 10 である定常状態の操作点を見つけます。
既定の操作点の仕様オブジェクトを作成します。
opspec = operspec(mdl);
最初のモデルの状態の仕様を設定します。最初の状態は下限が 0 の定常状態でなければなりません。状態値の初期推定として 2 を指定します。
opspec.States(1).SteadyState = 1; opspec.States(1).x = 2; opspec.States(1).Min = 0;
2 番目のモデル状態を、値が 10 の既知の状態として構成します。
opspec.States(2).Known = 1; opspec.States(2).x = 10;
これらの仕様を満たす操作点を検出します。
op = findop(mdl,opspec);
Operating point search report:
---------------------------------
opreport =
Operating point search report for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
Operating point search completed successfully using optimization.
States:
----------
Min x Max dxMin dx dxMax
______ ______ ______ ______ ______ ______
(1.) watertank/PID Controller/Integrator/Continuous/Integrator
0 1.2649 Inf 0 0 0
(2.) watertank/Water-Tank System/H
10 10 10 0 0 0
Inputs: None
----------
Outputs: None
----------
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
パラメーター A および b をそのノミナル値の 10% 以内で変化させ、3 行 4 列のパラメーター グリッドを作成します。
[A_grid,b_grid] = ndgrid(linspace(0.9*A,1.1*A,3),...
linspace(0.9*b,1.1*b,4));
パラメーターの構造体配列を作成し、各パラメーターに名前とグリッド点を指定します。
params(1).Name = 'A'; params(1).Value = A_grid; params(2).Name = 'b'; params(2).Value = b_grid;
モデルの既定の操作点の仕様を作成します。
opspec = operspec(mdl);
指定した操作点の仕様とパラメーター グリッドを使用してモデルを平衡化します。
opt = findopOptions('DisplayReport','off'); op = findop(mdl,opspec,params,opt);
op は、指定されたパラメーター グリッド点に対応する操作点オブジェクトの 3 行 4 列の配列です。
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
既定の操作点の仕様オブジェクトを作成します。
opspec = operspec(mdl);
オプティマイザーのタイプを勾配降下に設定して探索レポートを非表示にするオプション セットを作成します。
opt = findopOptions('OptimizerType','graddescent','DisplayReport','off');
指定されたオプション セットを使用してモデルを平衡化します。
op = findop(mdl,opspec,opt);
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
既定の操作点の仕様オブジェクトを作成します。
opspec = operspec(mdl);
最初のモデルの状態の仕様を設定します。
opspec.States(1).SteadyState = 1; opspec.States(1).x = 2; opspec.States(1).Min = 0;
2 番目のモデルの状態の仕様を設定します。
opspec.States(2).Known = 1; opspec.States(2).x = 10;
これらの仕様を満たす操作点を探索し、操作点探索レポートを返します。探索レポートを非表示にするオプション セットを作成します。
opt = findopOptions('DisplayReport',false);
[op,opreport] = findop(mdl,opspec,opt);
opreport は、操作点探索の終了時に最適化アルゴリズムがどれほど的確に仕様を満たしたかを示します。
opreport
opreport =
Operating point search report for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
Operating point search completed successfully using optimization.
States:
----------
Min x Max dxMin dx dxMax
______ ______ ______ ______ ______ ______
(1.) watertank/PID Controller/Integrator/Continuous/Integrator
0 1.2649 Inf 0 0 0
(2.) watertank/Water-Tank System/H
10 10 10 0 0 0
Inputs: None
----------
Outputs: None
----------
dx は、各状態の時間微分です。すべての dx 値がゼロなので、操作点は定常状態にあります。
Simulink モデルを開きます。
mdl = 'magball';
open_system(mdl)
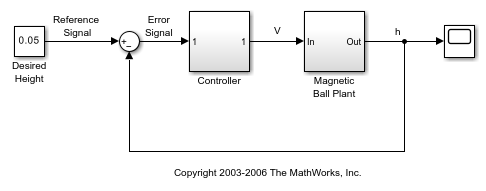
モデルをシミュレートして、時間単位 10 および 20 で操作点を抽出します。
op = findop(mdl,[10,20]);
op は、スナップショット時間ごとに 1 つの要素をもつ操作点の列ベクトルです。
最初の操作点を表示します。
op(1)
ans =
Operating point for the Model magball.
(Time-Varying Components Evaluated at time t=10)
States:
----------
x
__________
(1.) magball/Controller/PID Controller/Filter/Cont. Filter/Filter
5.4732e-07
(2.) magball/Controller/PID Controller/Integrator/Continuous/Integrator
14.0071
(3.) magball/Magnetic Ball Plant/Current
7.0036
(4.) magball/Magnetic Ball Plant/dhdt
8.443e-08
(5.) magball/Magnetic Ball Plant/height
0.05
Inputs: None
----------
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
パラメーター値を指定します。パラメーター グリッドは 5 行 4 列の配列です。
[A_grid,b_grid] = ndgrid(linspace(0.9*A,1.1*A,5),... linspace(0.9*b,1.1*b,4)); params(1).Name = 'A'; params(1).Value = A_grid; params(2).Name = 'b'; params(2).Value = b_grid;
モデルをシミュレートして、時間単位 0、5、10 で操作点を抽出します。
op = findop(mdl,[0 5 10],params);
findop はパラメーター値の各組み合わせでモデルをシミュレートして、指定されたシミュレーション時間における操作点を抽出します。
op は 3×5×4 の操作点オブジェクトの配列です。
size(op)
ans =
3 5 4
入力引数
出力引数
詳細
ヒント
initopspecを使用してシミュレーションのスナップショットの操作点探索、または以前に計算された操作点を初期化できます。操作点オブジェクトから状態値と入力値を抽出するには、それぞれ
getstatestructとgetinputstructを使用します。
アルゴリズム
既定の設定では、関数 findop はオプティマイザー graddescent-elim を使用します。別の最適化手法を使用するには、findopOptions を使用して options の OptimizerType の値を変更します。
関数 findop は以下の Simulink モデル プロパティを自動的に設定して最適化を行います。
BufferReuse = "off"BlockReductionOpt = 'off"SaveFormat = "StructureWithTime"
最適化の完了後、Simulink によって元のモデル プロパティが復元されます。
代替機能
アプリ
findop コマンドの代わりに、次のいずれかの方法で操作点を見つけることができます。
定常状態マネージャーを使用して操作点を計算する。例については、定常状態マネージャーを使用した仕様からの操作点の計算を参照してください。
線形化のために操作点を計算する場合、モデル線形化器を使用して操作点を検出し、モデルを線形化することができる。例については、モデル線形化器を使用した仕様からの操作点の計算を参照してください。