addoutputspec
出力仕様を操作点の仕様に追加
説明
例
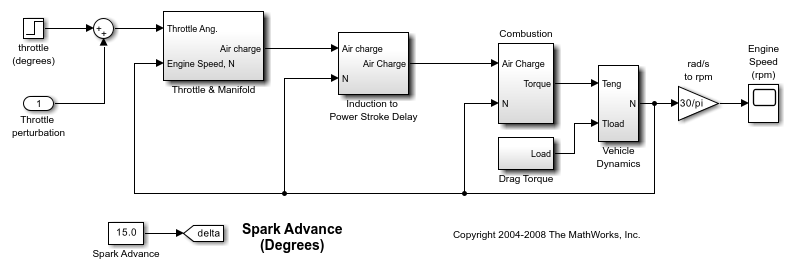
Simulink モデルを開きます。
sys = 'scdspeed';
open_system(sys)

モデル用に既定の操作点の仕様オブジェクトを作成します。
opspec = operspec(sys)
opspec =
Operating point specification for the Model scdspeed.
(Time-Varying Components Evaluated at time t=0)
States:
----------
x Known SteadyState Min Max dxMin dxMax
___________ ___________ ___________ ___________ ___________ ___________ ___________
(1.) scdspeed/Throttle & Manifold/Intake Manifold/p0 = 0.543 bar
0.543 false true -Inf Inf -Inf Inf
(2.) scdspeed/Vehicle Dynamics/w = T//J w0 = 209 rad//s
209.48 false true -Inf Inf -Inf Inf
Inputs:
----------
u Known Min Max
_____ _____ _____ _____
(1.) scdspeed/Throttle perturbation
0 false -Inf Inf
Outputs: None
----------
モデルにルートレベルの出力端子がないため、既定の操作点の仕様オブジェクトには出力仕様がありません。
rad/s to rpm ブロックの出力端子に出力仕様を追加します。
newspec = addoutputspec(opspec,'scdspeed/rad//s to rpm',1);
出力仕様に既知の値 2000 rpm を指定します。
newspec.Outputs(1).Known = 1; newspec.Outputs(1).y = 2000;
更新された操作点の仕様を表示します。
newspec
newspec =
Operating point specification for the Model scdspeed.
(Time-Varying Components Evaluated at time t=0)
States:
----------
x Known SteadyState Min Max dxMin dxMax
___________ ___________ ___________ ___________ ___________ ___________ ___________
(1.) scdspeed/Throttle & Manifold/Intake Manifold/p0 = 0.543 bar
0.543 false true -Inf Inf -Inf Inf
(2.) scdspeed/Vehicle Dynamics/w = T//J w0 = 209 rad//s
209.48 false true -Inf Inf -Inf Inf
Inputs:
----------
u Known Min Max
_____ _____ _____ _____
(1.) scdspeed/Throttle perturbation
0 false -Inf Inf
Outputs:
----------
y Known Min Max Period PeriodicTolerance
_________________ _________________ _________________ _________________ _________________ _________________
(1.) scdspeed/rad//s to rpm
2000 true -Inf Inf -1 0.0001
Simulink モデルを開きます。
sys = 'scdspeed';
open_system(sys)
モデル用に既定の操作点の仕様オブジェクトの 3 行 1 列の配列を作成します。
opspec = operspec(sys,[3,1])
opspec = Array of operating point specifications for the model scdspeed. To display an operating point specification, select an element from the array.
rad/s to rpm ブロックの出力端子に出力仕様を追加します。
newspec = addoutputspec(opspec,'scdspeed/rad//s to rpm',1);
この出力仕様は、opspec 内のすべての操作点の仕様オブジェクトに追加されます。
opspec の各仕様に異なる出力制約を指定できます。たとえば、仕様ごとに異なる既知の値を指定します。
newspec(1,1).Outputs(1).Known = 1; newspec(1,1).Outputs(1).y = 1900; newspec(2,1).Outputs(1).Known = 1; newspec(2,1).Outputs(1).y = 2000; newspec(3,1).Outputs(1).Known = 1; newspec(3,1).Outputs(1).y = 2100;
入力引数
出力引数
代替機能
定常状態マネージャー
定常状態マネージャーを使用してモデルを平衡化するときに、出力仕様を対話的に追加できます。詳細については、定常状態マネージャーを使用した仕様からの操作点の計算を参照してください。
Simulink モデル
Simulink モデル内に出力仕様を直接追加できます。そのためには、仕様を追加する信号を右クリックし、線形化マネージャー アプリのセクション  で、[平衡化出力制約]
で、[平衡化出力制約]  を選択します。
を選択します。
バージョン履歴
R2006a より前に導入