LPV System
線形パラメーター変動 (LPV) システムのシミュレーション
ライブラリ:
Control System Toolbox /
Linear Parameter Varying
説明
"線形パラメーター変動" (LPV) システムとは、"スケジューリング パラメーター" と呼ばれる特定の時変パラメーターの関数としてダイナミクスが変動する線形状態空間モデルです。MATLAB® では、パラメーター依存の係数を使用して、状態空間形式で LPV モデルを表現します。
LPV システムは、数学的には次のように表現できます。
ここで、以下となります。
u(t) は入力
y(t) は出力
x(t) は初期値 xinit をもつモデルの状態
は、連続時間システムでは状態微分ベクトル 、離散時間システムでは状態更新ベクトル x[k+1]。ここで、k はサンプリング周期 "Ts" の数をカウントする整数インデックスです。
A(p)、B(p)、C(p)、および D(p) は、スケジューリング パラメーター ベクトル p でパラメーター化された状態空間行列です。
パラメーター p = p(t) は、モデルの入力と状態の測定可能な関数です。これらは、スカラー量またはいくつかのパラメーターのベクトルで指定できます。スケジューリング パラメーターのセットにより、LPV モデルが定義される "スケジューリング空間" を定義します。
dx0(p)、x0(p)、u0(p)、および y0(p) は、与えられたパラメーター値 p = p(t) または p[k] における 、x(t)、u(t)、および y(t) の値のオフセットです。
linearize(Simulink Control Design) またはgetIOTransfer(Simulink Control Design) などの関数を呼び出すときに、追加の線形化情報を返すことでオフセットを取得できます。例については、昇圧コンバーター モデルの LPV 近似 (Simulink Control Design)を参照してください。
注意
C(p) および D(p) がシステム出力 [y] に依存することがないようにしてください。そうしないと、結果の状態空間方程式 y = C(y)x + D(y)u により、代数ループが作成されます。これは、出力値 y を計算するために出力値がわかっている必要があるからです。この代数ループは不安定性や発散が発生しやすい傾向にあります。代わりに、時間 t、ブロック入力 [u]、および状態出力 [x] の観点で C および D を表してみてください。
同様の理由で、[dx] 出力に基づいて A(p) および B(p) をスケジュールしないでください。なお、[y] が状態と入力の固定された組み合わせの場合 (つまり、y = Cx + Du の場合 (C および D は定数行列))、A および B が [y] に依存しても安全です。
ブロックでは、LPV システムのグリッドベースの表現を実装します。スケジューリング パラメーターで値のグリッドを選択します。それぞれの値 p = p* で、状態空間 (ss または idss (System Identification Toolbox)) モデル オブジェクトとして対応する線形システムを指定します。生成された状態空間モデルの配列を使用して、LPV System ブロックを構成します。
ブロックは、操作点情報をもつ状態空間モデルの配列を受け入れます。スケジューリング変数の情報は、ブロックで LTI 配列の SamplingGrid プロパティから抽出されます。スケジューリング変数は、LPV モデルのグリッドを定義します。これらは、スカラー値の量であり、時間の関数、入力および状態、あるいは定数を指定できます。これらは動作空間でローカル ダイナミクスの選択に使用されます。ソフトウェアは、これらの変数値を内挿します。ブロックは、データの内挿および外挿の手法でこの配列を使用してシミュレーションを実行します。
例
2 入力、3 出力、4 状態の LPV モデルについて考えます。入力 u(2) および状態 x(1) をスケジューリング パラメーターとして使用します。次の図に示すように Simulink® モデルを構成します。

質量が外部負荷コマンドの関数として変化する線形マス-バネ-ダンパー システムについて考えます。支配方程式は次のとおりです。
ここで、 は外部コマンド に依存する質量、 は減衰比、 はバネの剛性、 は強制入力です。 は特定の時刻 における質量の位置です。 の固定値に対して、システムは線形であり、次のように表せます。
,
ここで、 は状態ベクトル、 は の特定の値に対する質量の値です。
この例では、1 ~ 10 V の入力値の範囲でモデルの動作を学習します。 の各値に対して、質量を測定し、システムの線形表現を計算します。質量が という関係で入力と関連付けられるとします。1 ~ 10 の u の値に対して、次のような線形システムの配列の結果となります。
c = 5; k = 300; u = 1:10; m = 10*u + 0.1*u.^2; for i = 1:length(u) A = [0 1; -k/m(i), -c/m(i)]; B = [0; 1/m(i)]; C = [1 0]; sys(:,:,i) = ss(A,B,C,0); end
変数 はスケジューリング入力です。この情報をモデルに追加します。
sys.SamplingGrid = struct('LoadCommand',u);LPV System ブロックを構成します。
[状態空間配列] フィールドに
sysを入力します。入力端子
parを、load コマンドの値を生成する 1 次元のソース信号に接続します。ソースが 1 ~ 10 の値を提供する場合、ブロックは内挿を使用して特定の時刻インスタンスで線形モデルを計算します。それ以外の場合、ブロックは外挿を使用します。

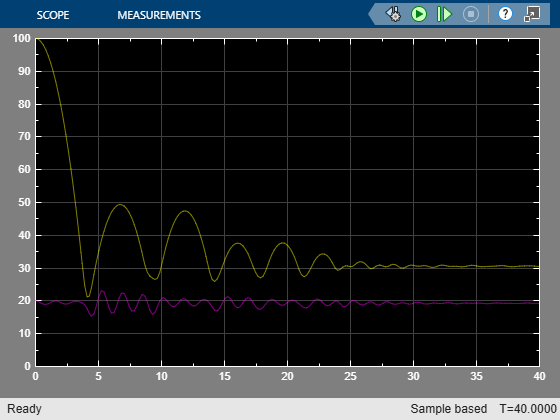
LPV モデルを 100 N の一定の強制入力までシミュレートします。load コマンドのスケジューリング変数には乱数値を使用します。
model = "simMSDLPV";
open_system(model);

この例では、LPV System ブロックを使用してエンジン速度の線形パラメーター変動 (LPV) モデルをシミュレートする方法を示します。LPV System ブロックは、状態空間配列を内挿して LPV の応答をモデル化します。一般に、このような配列は非線形モデルを操作条件の範囲でバッチ線形化することで得られます。この例では、エンジン速度モデルの線形化された結果が scdspeedlpvData に用意されています。このモデルの線形化の詳細については、エンジン速度モデルの線形化 (Simulink Control Design)を参照してください。
モデルを開きます。
model = "scdspeedLPVCompare";
open_system(model);
LPV モデルを実装するための線形化の結果を読み込みます。
load scdspeedlpvData.matLPV モデルが LPV Model サブシステムに実装されます。
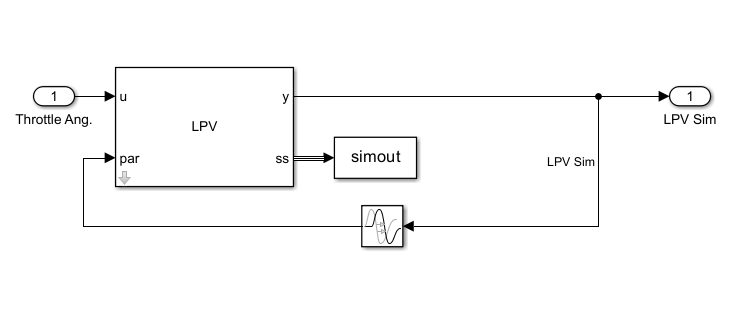
LPV System ブロックは、スロットル角度を入力として取り、速度出力をスケジューリング変数として使用します。ブロック パラメーターは次のイメージに示すように構成されています。ここで、状態空間配列 sys とオフセットは、非線形モデルをバッチ線形化して得られたものです。

モデルをシミュレートし、応答の比較をプロットします。
sim(model);
plot(logsOut{1}.Values.Time,logsOut{1}.Values.Data)
grid on
legend("Nonlinear sim","LPV sim","LTI sim",Location="best")
LPV モデルは非線形応答の良好な近似を示しています。
拡張例
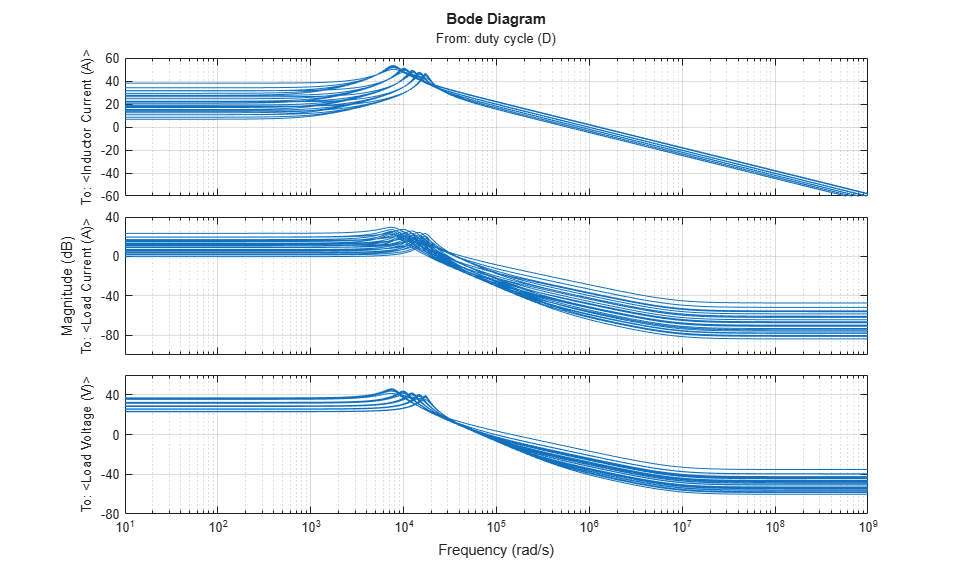
昇圧コンバーター モデルの LPV 近似
線形パラメーター変動モデルを使用して非線形の Simscape™ Electrical™ モデルを近似する。
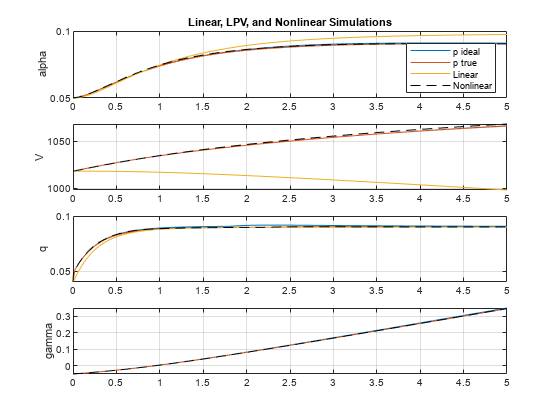
航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証
線形パラメーター変動モデルを使用して機体のピッチ軸ダイナミクスの非線形動作を近似する。
LTI 配列を使用したマルチモード ダイナミクスのシミュレーション
この例では、マルチモード ダイナミクスを示すシステムの線形パラメーター変動 (LPV) 表現を構成する方法を説明します。

LTI システムの配列を使用した非線形動作の近似
線形パラメーター変動モデルを使用して非線形システムのダイナミクスを近似できます。