LTV モデリングと LPV モデリング
LTV モデルと LPV モデルのタイプ
線形時変 (LTV) モデルと線形パラメーター変動 (LPV) モデルには 2 つの主要なカテゴリがあります。
データ関数 (MATLAB® 関数) で指定されるモデル。"解析的" モデルとも呼ばれます。多くの場合、これらは状態空間方程式がいくつかの時変またはパラメーター依存の項を除いてほぼ線形な物理モデルです。このようなモデルの例には、跳ねるボールの LPV モデル、エンジン スロットルの LPV モデル、ゲイン スケジュール PI コントローラーの解析、回転ディスクの制御設計のモデルがあります。磁気浮上システムの LPV モデルおよびゲイン スケジュール制御の隠れ結合で示しているように、非線形モデルを手動で線形化したものも含まれます。
線形化の結果を軌跡に沿って内挿するか操作条件のグリッドで内挿するモデル。"データ駆動型" モデルとも呼ばれます。各線形化で特定の時点か特定の操作点の周囲の局所線形ダイナミクスを取得し、内挿でそれらの操作状態間の滑らかな遷移を提供します。このようなモデルの例は、航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証、昇圧コンバーター モデルの LPV 近似、磁気浮上システムのバッチ線形化の結果からの LPV モデル、2 リンク ロボットの LTV モデル、風力タービンの制御設計で示しています。
"グリッド付き" モデルは、技術的には解析的モデルの一種であり、データ関数が数式駆動型ではなくデータ駆動型である特別なタイプです。ただし、概念的には、2 つのタイプのモデルでは起源が異なり、それぞれ異なるモデリング ワークフローと近似方法に対応します。
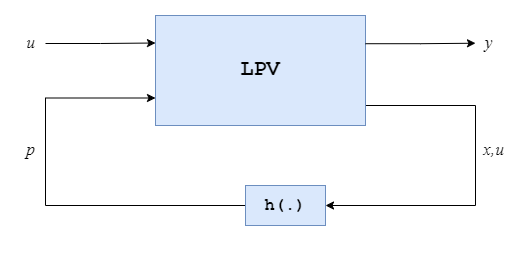
準 LPV モデルは、スケジューリング マップまたはパラメーターの軌跡 p(t) が外因的ではなく内因的であり、つまりモデルの状態 x と入力 u に依存する LPV モデルです。これは、LPV モデルとスケジューリング マップの間のフィードバック ループを作成します。
lpvss オブジェクトでは、スケジューリング マップを含む準 LPV モデル全体を表現することはできません。ただし、スケジューリング関数 をパラメーターの軌跡として指定することで、準 LPV モデルの応答をシミュレートできます。準 LPV モデルでは、事実上どのような非線形システムも表現できますが、非線形システムが線形になるわけではありません。非線形性をスケジューリング マップに移すときは、慎重に行わないと不安定になったり問題に気付かないことがあります (ゲイン スケジュール制御の隠れ結合を参照)。ただし、このような問題は、p(t) が支配的なシステム ダイナミクスに比べてゆっくり変化する場合は一般には発生しません (詳細についてはゲイン スケジュール LQG コントローラーの例を参照)。準 LPV シミュレーションの例には、磁気浮上システムの LPV モデル、跳ねるボールの LPV モデル、エンジン スロットルの LPV モデル、航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証、風力タービンの制御設計があります。
LPV モデルの制限
LPV 近似は、短い時間スケールの動作がほぼ線形で、長い時間ホライズンでは非線形または時変であるシステムに最も役立ちます。ダイナミクスが高速で非線形性の高いシステムにはあまり役立たない傾向にあります。準 LPV モデルは、スケジューリング フィードバック ループのダイナミクスがゆっくりであるか穏やかな場合に最も役立ちます。それらのダイナミクスが LPV モデル自体 (または LPV モデルのみに基づくゲイン スケジュール制御ループ) のダイナミクスよりも優位である場合はほとんど役立ちません。
線形化ダイナミクスに基づくグリッド付き LPV モデルでは、飽和や不感帯などの強い非線形性は表現できません (例についてはゲイン スケジュール制御の隠れ結合を参照)。ただし、それらを静的な非線形性と組み合わせることで、そのような動作を再現できます。
オフセットと初期条件
オフセットは LTV モデルおよび LPV モデルの重要な部分です。次の非線形モデルの線形化について考えます。
操作点 (x0,u0) の周囲については次のようになります。
ここで、
線形化で非線形マップの良好な近似を得るには、オフセット δ0、x0、u0、および y0 を含めなければなりません。linearize (Simulink Control Design) コマンドで StoreOffset オプションを使用すると、A、B、C、D とオフセットの両方が返されます。ほとんどのグリッド付きの LTV モデルと LPV モデルでは、これが作成のベースとなります。ltvss オブジェクトおよび lpvss オブジェクトでは、相互接続演算 (feedback、connect、series、parallel、lft) と c2d、d2c、d2d などの変換を通じて、オフセットが自動的に管理されて伝播されます。
オフセットと初期条件は、時間応答シミュレーションにおいて重要になります。非線形動作の正しい結果と良好な近似を得るには次のことが重要です。
入力信号またはステップ変化が絶対的なものであるか、あるいはオフセット u0 に対する相対的なものであるかを検討します。
状態ベクトルを正しく初期化します。操作条件 (x0,u0) が平衡条件である場合、状態ベクトルを x0 に初期化し、u0 に対する相対的なステップ変化を適用すると、シミュレーションが確実に定常状態 (x0,u0) から始まり、この条件の周囲で非線形動作が近似されるようになります。これらの値は、ステップで
RespConfigを使用して指定します。例については、航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証、跳ねるボールの LPV モデル、昇圧コンバーター モデルの LPV 近似、2 リンク ロボットの LTV モデル、エンジン スロットルの LPV モデルを参照してください。パラメーターの軌跡を指定します。外因的なパラメーターの場合は明示的に指定し (昇圧コンバーター モデルの LPV 近似、回転ディスクの制御設計、ゲイン スケジュール PI コントローラーの解析、ゲイン スケジュール LQG コントローラーを参照)、準 LPV シミュレーションの場合は t、x、u の関数として暗黙的に指定します (跳ねるボールの LPV モデル、エンジン スロットルの LPV モデル、航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証、風力タービンの制御設計を参照)。これらの 2 つの手法の厳密な比較については、磁気浮上システムの LPV モデルおよびゲイン スケジュール制御の隠れ結合を参照してください。
LTV モデルと LPV モデルの増分形式
次の非線形方程式を満たす軌跡 (x0(t),u0(t),y0(t)) に沿って線形化します。
線形化モデルは次のように表現できます。
ここで、
これらは基準軌跡からの偏差です。詳細については、2 リンク ロボットの LTV モデルの例を参照してください。
この "増分" または "差分" 形式は、ltvss および lpvss に使用される線形化形式よりもシンプルに見えます。ただし、一般には LPV モデルの有効な表現ではありません。たとえば、すべての p について次を満たす一連の定常状態の操作条件 (x0(p),u0(p),y0(p)) から作成された LPV モデルについて考えてみます。
p が固定の場合、(x0(p),u0(p),y0(p)) の周囲の線形化ダイナミクスを次のように記述できます。
ここで次のとおりです。
これは、p が時間によって変化する場合、つまりシステムを別の定常状態条件にする LPV の軌跡においては正しくなくなります。この場合、次のようになります。
増分形式には、x0(p(t)) の時間微分に関する追加の項が含まれていますが、この量は簡単には取得できません。そのため、線形化形式の方が推奨されます。
状態の一貫性と状態変換
状態空間モデルの配列から LPV モデルを作成するときは、必ず一貫した状態座標でモデルが表現されるようにします。たとえば、一部のモデルで状態を並べ替えた場合は、他のモデルでも並べ替えないと状態が一致しなくなり、内挿される LPV モデルが無効になります。一般に、固定の状態変換では状態の一貫性が維持されますが、個々のモデルのモード分解のような独立した状態変換では維持されません。
これは、時変またはパラメーター変動の変換が許容されないということではありません。次の LTV モデルについて考えてみます。
時変の状態変換 x = T(t)z により、次の等価なモデルが生成されます。
ただし、追加の項 に、独立した状態変換が問題になる理由があります。T(t) が時間サンプル tk の間に急に変化すると、変換後のモデルの追加の項は になります。これは大きくなる場合があり、Tk = T(tk) を使用して各モデルを個別に変換するときは考慮されません。
一般に、可変の状態変換は、時間またはパラメーターに応じてゆっくり変化し、項 を無視できる場合にのみ適切になります。
グリッド付きモデルとサンプリング グリッドの選択
LPV モデルの一般的な表現方法として、線形状態空間モデルの内挿された配列として表すことがあげられます。たとえば、航空機の空力挙動 (航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証を参照) は、多くの場合、入射角 (α) と風速 (V) の値のグリッド上でスケジュールされます。各スケジューリング パラメーターに対して、α = -20:5:20 度、V = 700:100:1400 m/s などのように値の範囲を選択します。(α,V) 値の各組み合わせに対して、航空機の動作の線形近似を取得します。ローカル モデルは、次の図に示すように接続されます。

それぞれの点はローカル LTI モデルを表し、曲線の接続は内挿ルールを表します。表面の横座標と縦座標は、スケジューリング パラメーター (α,V) です。
グリッド付きの LTV モデルまたは LPV モデルを使用して非線形ダイナミクスを近似する場合、使用するグリッドの密度とグリッド点の最適な分布を決める必要があります。グリッドを密にすると、近似の精度は高くなりますが、すべてのグリッド点の行列とオフセットを格納するのに多くのメモリが必要になります。メモリ使用量を削減するには、代表的な使用例 (特定のパラメーターの軌跡についてのシミュレーション) に対する LPV 近似の精度に注目しながらグリッドを間引きします。
LPV 近似の目的の精度が得られている密なグリッドから始めます。その後、sample を使用して LPV ダイナミクスをサンプリングし、局所的な LTI ダイナミクスが大きくは変わらないパラメーターの範囲を探すことができます。さらに、ssInterpolant を使用してさまざまなグリッドの密度を試し、LPV モデルの忠実度が低下する程度を観察できます。最後に、構造情報もこのプロセスの指針となります。たとえば、行列とオフセットが一部のパラメーターに線形に依存している場合、このパラメーターの 2 つの極値で全区間のパラメーターの変化が十分に取得されます (線形内挿を想定)。一方、パラメーターの依存性が非線形の場合は、より多くのグリッド点が必要になります。
ゲイン スケジュール制御設計では、LPV プラント モデルのグリッドよりも粗いグリッドをコントローラーに使用することが慣例となっています。一致しないグリッドはソフトウェアでシームレスに処理されます。この慣例の例については、航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証、磁気浮上システムのバッチ線形化の結果からの LPV モデル、風力タービンの制御設計を参照してください。
シミュレーションとコード生成の高速化のための LPV モデルの最適化
LPV モデルでは、高速なシミュレーションとコード生成をサポートする高忠実度モデルの低複雑度近似を提供できます。元のモデルが高忠実度の非線形モデルの場合、操作条件の密なグリッドでのバッチ線形化により、グリッド付き LPV 近似を作成するための材料が得られます。元のモデルが解析的 LPV モデルの場合は、ssInterpolant を使用してグリッド付き LPV モデルにすることができます。その後、ssInterpolant を使用してグリッド付き LPV モデルをリサンプリングすると、前述のようにメモリ使用量を削減できます。最後に、離散時間モデルの方がシミュレーションが高速な傾向にあり、コード生成と展開にも適しているため、グリッド付き LPV モデルを c2d で離散化することができます。例については、2 リンク ロボットの LTV モデルおよび昇圧コンバーター モデルの LPV 近似を参照してください。
その他の考慮事項
LTV モデルと LPV モデルは、SISO の場合でも可換ではありません。たとえば、ゲイン スケジュール PI コントローラーの解析の例で示しているように、ゲイン スケジュール PI コントローラーでは、ゲイン スケジュール積分ゲインを積分器の前に配置することと後に配置することは同じではありません。
参考
lpvss | ltvss | sample | ssInterpolant | LPV System