跳ねるボールの LPV モデル
この例では、lpvss を使用して、マルチモード ダイナミクスを示すシステムの線形パラメーター変動 (LPV) 表現を構成する方法を説明します。
このシステムのダイナミクスは関数 BouncingBallDF で定義されています。このモデルの詳細については、LTI 配列を使用したマルチモード ダイナミクスのシミュレーションを参照してください。
非圧縮時のバネの長さ a1 と a2 および初期の質量の高さ h1 と h2 を定義します。
a1 = 12; % uncompressed length of spring 1 (mm) a2 = 20; % uncompressed length of spring 2 (mm) h1 = 100; % initial height of mass m1 (mm) h2 = a2; % initial height of mass m2 (mm)
中程度の床剛性
最初に、2 番目の質量 k2 のバネ定数を 300 g/s^2 に設定して、柔らかい表面に対する応答をシミュレートします。状態は です。
入力は定数 = 1 (強制項は ) です。
k2 = 300; % spring constant for second mass (g/s^2) sys = lpvss("ygap",@(t,p) BouncingBallDF(t,p,k2)); % p = ygap = y1-y2 t = 0:0.05:40; pFcn = @(t,x,u) x(1)-x(3); xinit = [h1;0;h2;0]; [y,~,~,~,p] = step(sys,t,pFcn,RespConfig('InitialState',xinit)); figure(1), plot(t,y(:,1),t,y(:,2),t,abs(p-a1)) legend('y1','y2','|p-a1|') title('k2 = 300')
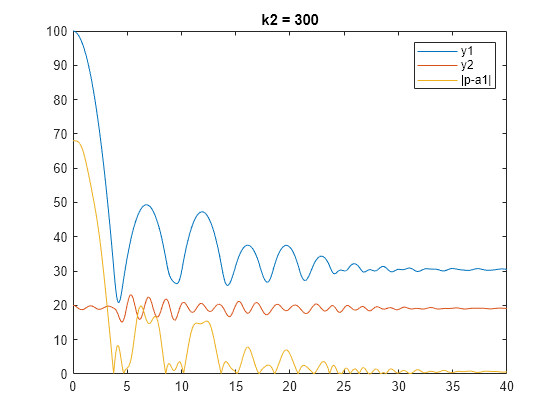
曲線は質量の位置を示します。シミュレーションが開始されると、質量 1 は質量 2 に衝突するまで自由落下します。衝突すると質量 2 は押し付けられますが、ただちに跳ね返り、質量 1 を押し戻します。2 つの質量は、 である期間中は接触しています。質量が停止するときの質量の平衡値は、重力による静的な整定により決定されます。
高い床剛性
次に、k2 を 30,000 g/s^2 に設定して、硬い表面に対する応答をシミュレートします。
k2 = 3e4; % spring constant for second mass (g/s^2) sys = lpvss("ygap",@(t,p) BouncingBallDF(t,p,k2)); t = 0:0.05:80; [y,~,~,~,p] = step(sys,t,pFcn,RespConfig('InitialState',xinit)); figure(2), plot(t,y(:,1),t,y(:,2),t,abs(p-a1)) legend('y1','y2','|p-a1|') title('k2 = 3e4')
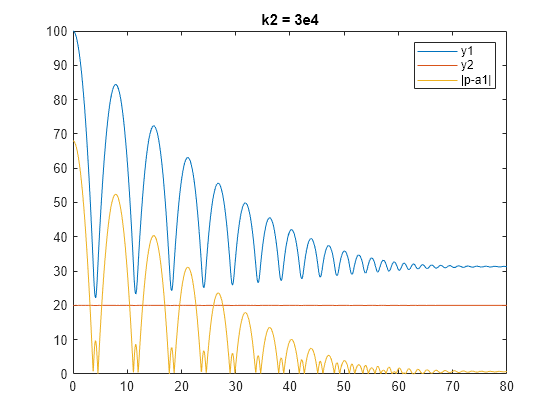
高い床剛性では、衝突時に質量 2 が押し付けられません。代わりに、より高い位置まで質量 1 を押し戻します。また、質量 1 が整定するまでに跳ね返る回数が多くなります。
データ関数のコード
type BouncingBallDF.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = BouncingBallDF(~,p,k2)
% p = gap y1-y2
m1 = 7; % first mass (g)
k1 = 100; % spring constant for first mass (g/s^2)
c1 = 2; % damping coefficient associated with first mass (g/s)
m2 = 20; % second mass (g)
%k2 = 300; % spring constant for second mass (g/s^2)
c2 = 5; % damping coefficient associated with second mass (g/s)
g = 9.81; % gravitational acceleration (m/s^2)
a1 = 12; % uncompressed lengths of spring 1 (mm)
a2 = 20; % uncompressed lengths of spring 2 (mm)
if p>a1
% Uncoupled
A11 = [0 1; 0 0];
B11 = [0; -g];
C11 = [1 0];
D11 = 0;
A12 = [0 1; -k2/m2, -c2/m2];
B12 = [0; -g+(k2*a2/m2)];
C12 = [1 0];
D12 = 0;
A = blkdiag(A11, A12);
B = [B11; B12];
C = blkdiag(C11, C12);
D = [D11; D12];
else
A = [ 0 1, 0, 0; ...
-k1/m1, -c1/m1, k1/m1, c1/m1;...
0, 0, 0, 1; ...
k1/m2, c1/m2, -(k1+k2)/m2, -(c1+c2)/m2];
B = [0; -g+k1*a1/m1; 0; -g+(k2/m2*a2)-(k1/m2*a1)];
C = [1 0 0 0; 0 0 1 0];
D = [0;0];
end
E = [];
dx0 = [];
x0 = [];
u0 = [];
y0 = [];
Delays = [];