磁気浮上システムの LPV モデル
この例では、磁気浮上システムの解析的線形パラメーター変動 (LPV) モデルを使用してボールの高さを制御します。この例では、LPV プラント モデルを線形運動方程式から直接作成します。
非線形システム
次の図は、磁気ボール浮上装置とその主要コンポーネントを示しています。ボールに対する磁力を発生させるコイルに電流 (A) が供給されます。ボールの位置は (m) で表されます。赤外線センサーでボールの位置 (V) が測定されます。目的は、目標位置 にボールを浮上させることです。ボールに加わる主な力は、重力による引力 と磁力 の 2 つです。
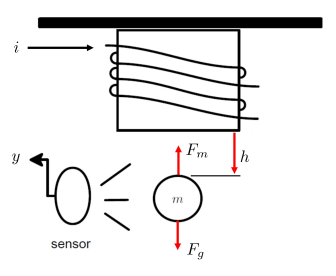
モデルのダイナミクスは次の非線形方程式で定義されます。
ここで、以下となります。
はボールの質量 (kg) です。
は重力加速度 (m/s^2) です。
は磁力の定数 (Nm/(A^2)) です。
モデルのパラメーターを定義します。
mb = 0.02; g = 9.81; alpha = 2.4832e-5;
平衡条件
ボールの高さ の平衡 (定常状態) 条件は次の方程式で特徴付けられます。
.
この高さを維持するために必要な電流は次のとおりです。
.
線形運動方程式
このプラントの LPV 近似を作成するには、スケジューリング変数として を選択し、 依存の平衡条件のまわりで運動方程式を線形化します。
.
これにより、次のような LPV モデルが得られます。
ここで次のとおりです。
および
.
このシステムの行列とオフセットは関数 dataFcnMaglev.m で定義されています。
lpvss を使用してモデルを作成します。
Glpv = lpvss('h',@dataFcnMaglev);ゲイン スケジュール PID コントローラー
PID 調整のために、 の値をいくつか選択し、それらの高さにおける LPV ダイナミクスをサンプリングして局所的な LTI モデルを取得します。
高さの値を 0.05 ~ 0.25 の範囲で 3 つ選択します。
hmin = 0.05; hmax = 0.25; hcd = linspace(hmin,hmax,3); [Ga,Goffsets] = sample(Glpv,[],hcd); size(Ga)
1x3 array of state-space models. Each model has 1 outputs, 1 inputs, and 2 states.
の各値について、pidtune を使用して PID コントローラーを調整します。ターゲット交差周波数は 50 rad/s に設定されています。
wc = 50;
Ka = pidtune(Ga,'pid',wc);
Ka.Tf = 0.001;次に、ssInterpolant を使用して、 の選択した値の間に調整後のゲインを線形に内挿するゲイン スケジュール PID コントローラーを作成します。このコントローラーでは、フィードフォワード制御として平衡電流 も使用します。これにより、PID でその平衡値近くに電流が調整されるようになります。
Ka.SamplingGrid.h = hcd;
Koffsets = struct('y',{Goffsets.u});
Klpv = ssInterpolant(ss(Ka),Koffsets);LTI の解析
評価用に、理想的な応答を 2 次システム Tideal としてモデル化します。
wn = 30; zeta = 0.7; Tideal = tf(wn^2,[1 2*zeta*wn wn^2]);
より細かい のグリッドで閉ループ LPV ダイナミクスをサンプリングします。
hs = linspace(hmin,hmax,5);
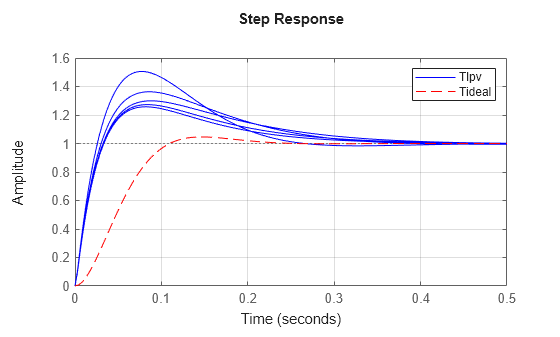
閉ループ モデルのステップ応答をシミュレートし、Tideal と比較します。
Tlpv = feedback(Glpv*Klpv,1); step(sample(Tlpv,[],hs),'b',Tideal,'r--',0.5); grid on legend('Tlpv','Tideal')
閉ループ システムには、理想的な応答である Tideal にはない追加のゼロがあります。これらのゼロは PID コントローラーから生じるもので、これによって立ち上がり時間が短くなり、オーバーシュートが大きくなっています。
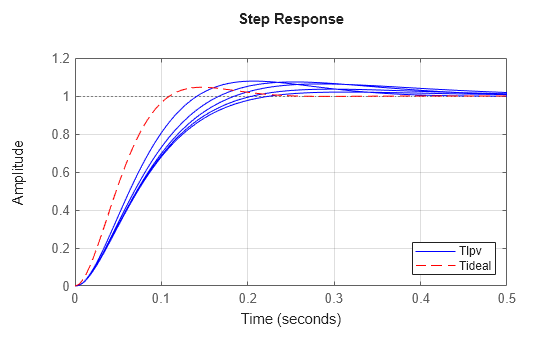
基準プレフィルター Fref を使用した 2 自由度のアーキテクチャを使用することで、オーバーシュートを低減できます。簡単にするために、プレフィルターを LTI システムとしてモデル化します。
Fref = ss(-10,10,1,0); step(sample(Tlpv*Fref,[],hs),'b',Tideal,'r--',0.5);
grid on; legend('Tlpv','Tideal','Location','Southeast');
LPV シミュレーション
非線形の閉ループ応答を近似するために、プレフィルターを使用して閉ループ LPV モデルの過渡応答をシミュレートします。これにはパラメーターの軌跡 を指定する必要がありますが、これは前もってはわかりません。代わりに、Tideal*Fref で生成される "理想的" な応答に設定できます。
CL = Tlpv*Fref;
初期の高さとステップ信号のパラメーターを設定します。
h0 = (hmin+hmax)/2; tstep = 0.2; Tf = 1.2; hStepAmp = 0.25*h0;
を理想的な軌跡に設定し、応答をシミュレートします。
t = linspace(0,tstep+Tf,100); StepConfig = RespConfig('Bias',h0,'Delay',tstep,'Amplitude',hStepAmp); p_ideal = step(Tideal*Fref,t,StepConfig); y1 = step(CL,t,p_ideal,StepConfig);
あるいは、"実際" の軌跡を使用する場合は、 を時間 、入力 、および状態 の関数 として暗黙的に指定できます。ここで、 は単に最初の状態です。
と設定し、ステップ応答をシミュレートします。
pFcn = @(t,x,u) x(1); StepConfig = RespConfig('Bias',h0,'Delay',tstep,... 'Amplitude',hStepAmp,'InitialParameter',h0); y2 = step(CL,t,pFcn,StepConfig);
2 つの応答をプロットして比較します。
plot(t,y1,t,y2); legend('p ideal','p true','Location','Southeast'); grid
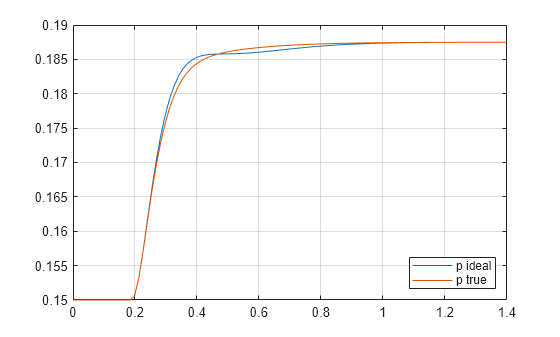
2 つの応答は互いに近くなっています。この例に対応する Simulink ベースの例では、"実際" の軌跡を使用したシミュレーション用の小さいエッジがある両方の LPV シミュレーションで非線形応答がよく近似されています。
プラント データ関数
type dataFcnMaglev.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = dataFcnMaglev(~,p) % MAGLEV example: % x = [h ; dh/dt] % p=hbar (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; A = [0 1;2*g/p 0]; B = [0 ; -2*sqrt(g*alpha/mb)/p]; C = [1 0]; % h D = 0; E = []; dx0 = []; x0 = [p;0]; u0 = sqrt(mb*g/alpha)*p; % ibar y0 = p; % y = h = hbar + (h-hbar) Delays = [];
参考
lpvss | sample | step | RespConfig