lpvss
説明
lpvss は、時間依存パラメーターの関数としてダイナミクスが変動する線形状態空間モデルを表すために使用します。"線形パラメーター変動" (LPV) モデルは、非線形システムの複雑度が低い局所的な線形近似を取得するのに役立ちます。特にパラメーターが内部状態に依存する場合 (準 LPV) など、LTI モデルよりもはるかに高度な動作をモデル化できます。そのため、lpvss モデルを使用すると、ゲイン スケジュール制御などの設計法を非線形モデルに効率的に適用できます。
lpvss を使用して連続時間または離散時間の線形パラメーター変動状態空間モデルを作成できます。連続時間の場合、lpvss モデルは次の状態空間方程式で記述されます。
ここで、p は時間依存の外生パラメーターのベクトル、δ0(t,p)、x0(t,p)、u0(t,p)、y0(t,p) はそれぞれ可変の微分、状態、入力、出力のオフセットです。
離散時間の場合、lpvss モデルは次の状態空間方程式で記述されます。
ここで、整数インデックス k はサンプリング周期 Ts の数をカウントします。
lpvss オブジェクトを使用して以下をモデル化できます。
係数が外部パラメーターまたは環境パラメーターに依存する線形システム。例については、回転ディスクの制御設計を参照してください。
少数の物理パラメーターに依存して時間によって変化する定常状態条件の近くで動作する非線形システム。たとえば、航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証を参照してください。
lpvss は、ダイナミクスが MATLAB® 関数 ("データ関数") で記述される LPV モデルを作成する場合に使用します。線形化された LTI ダイナミクスを操作条件のグリッドで内挿する LPV モデルを作成する場合は ssInterpolant を使用します。lpvss オブジェクトでは、LPV モデルとスケジューリング マップ p(t) = h(t,x,u) で構成される準 LPV モデルは表現できませんが、パラメーターの軌跡を時間 t、状態 x、および入力 u の関数として指定して準 LPV モデルをシミュレートできます。lpvss オブジェクトに適用できる関数と演算については、LPV モデルと LTV モデルを参照してください。
作成
構文
説明
lpvSys = lpvss(ParamNames,DataFcn)ParamNames で、パラメーター ベクトル p の各要素の名前を指定します。DataFcn は、"データ関数" の名前またはハンドルです。これは、与えられた (t,p) の値 (離散時間の場合は (k,p) の値) について行列とオフセットを計算するユーザー定義の MATLAB 関数です。
lpvSys = lpvss(ParamNames,DataFcn,ts)ts の離散時間 LPV モデルを作成します。
lpvSys = lpvss(ParamNames,DataFcn,ts,tcheck,pcheck)DataFcn を (tcheck,pcheck) で評価し、状態、入力、および出力の数を特定します。既定では、lpvss は (tcheck,pcheck) = (0,0) を使用します。
lpvSys = lpvss(___,PropertyName=Value)
入力引数
プロパティ
オブジェクト関数
例
連続時間 SISO 線形パラメーター変動モデルを作成します。
この例では、dataFcnMaglev.m で磁気浮上システムの行列とオフセットを定義します。ボールに対する磁力を発生させるコイル電流を使用して、磁気浮上で浮遊するボールの高さを制御します。
これらの行列とオフセットは、この例で用意されているデータ関数 dataFcnMaglev.m で定義されています。
LPV モデルを作成します。
lpvsys = lpvss('p',@dataFcnMaglev)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
データ関数を表示します。
type dataFcnMaglev.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = dataFcnMaglev(~,p) % MAGLEV example: % x = [h ; dh/dt] % p=hbar (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; A = [0 1;2*g/p 0]; B = [0 ; -2*sqrt(g*alpha/mb)/p]; C = [1 0]; % h D = 0; E = []; dx0 = []; x0 = [p;0]; u0 = sqrt(mb*g/alpha)*p; % ibar y0 = p; % y = h = hbar + (h-hbar) Delays = [];
離散時間線形パラメーター変動モデルを作成します。
行列とオフセットは次によって与えられます。
, , ,
.
これらの行列とオフセットは、この例で用意されているデータ関数 lpvFcnDiscrete.m で定義されています。
プロパティを指定し、LPV モデルを作成します。
Ts = 0.01;
ParamNames = 'p';
DataFcn = @lpvFcnDiscrete;
lpvSys = lpvss(ParamNames,DataFcn,Ts)Discrete-time state-space LPV model with 1 outputs, 1 inputs, 1 states, and 1 parameters. Model Properties
データ関数を表示します。
type lpvFcnDiscrete.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = lpvFcnDiscrete(k,p) A = sin(0.1*p); B = 1; C = 1; D = 0; E = []; dx0 = []; x0 = []; u0 = []; y0 = 0.1*sin(k); Delays = [];
この例では、dataFcnMaglev.m で磁気浮上システムの行列とオフセットを定義します。ボールに対する磁力を発生させるコイル電流を使用して、磁気浮上で浮遊するボールの高さを制御します。この例では、開ループでモデルをシミュレートします。
LPV モデルを作成します。
lpvSys = lpvss('h',@dataFcnMaglev)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
ドット表記を使用して追加のプロパティを設定できます。
lpvSys.StateName = {'h','hdot'};
lpvSys.InputName = 'current';
lpvSys.InputName = 'height';このモデルの任意の正弦波入力電流に対する応答をシミュレートします。
h0 = 1; [~,~,~,~,~,~,x0,u0,~] = dataFcnMaglev([],h0); t = 0:1e-3:1; u = u0*(1+0.1*sin(10*t)); y = lsim(lpvSys,u,t,x0,@(t,x,u) x(1));
応答をプロットします。
plot(t,y,t,u/u0) legend('height','current')
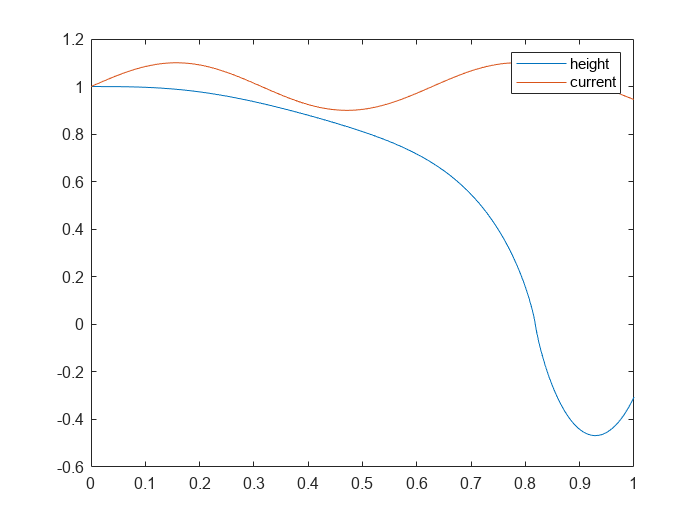
電流が最初に増加した時点でボールが磁石に引き寄せられます (h が減少します)。その後の電流の減少は、元に戻るほど十分なものではありません。
このモデルの特異点は h = 0、つまりボールが磁石に当たるときです。LPV モデルは、この時点で有効ではなくなります。
LPV モデルのダイナミクスを (,) の値の点またはグリッドでサンプリングし、特定の時間またはパラメーターの値におけるアフィン ダイナミクスを取得できます。
この例では、dataFcnMaglev.m で磁気浮上システムの行列とオフセットを定義します。ボールに対する磁力を発生させるコイル電流を使用して、磁気浮上で浮遊するボールの高さを制御します。
LPV モデルを作成します。
lpvSys = lpvss('h',@dataFcnMaglev)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
LPV ダイナミクスを 3 つの h 値でサンプリングして局所的な LTI モデルを取得します。
hmin = 0.05; hmax = 0.25; hcd = linspace(hmin,hmax,3); ssArray = psample(lpvSys,[],hcd); size(ssArray)
1x3 array of state-space models. Each model has 1 outputs, 1 inputs, and 2 states.
関数により、モデルのオフセットが配列の Offsets プロパティに格納されます。
ssArray.Offsets
ans=1×3 struct array with fields:
dx
x
u
y
ボード応答をプロットします。
bodemag(ssArray)

データ関数を表示します。
type dataFcnMaglev.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = dataFcnMaglev(~,p) % MAGLEV example: % x = [h ; dh/dt] % p=hbar (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; A = [0 1;2*g/p 0]; B = [0 ; -2*sqrt(g*alpha/mb)/p]; C = [1 0]; % h D = 0; E = []; dx0 = []; x0 = [p;0]; u0 = sqrt(mb*g/alpha)*p; % ibar y0 = p; % y = h = hbar + (h-hbar) Delays = [];
R2024a 以降
この例は、可変の遅延を含む線形パラメーター変動モデルを作成する方法を示しています。この例では、出力遅延を含むコントローラーで閉ループ プラントをシミュレートし、コントローラー応答の遅延による効果も確認します。
この例では、dataFcnMaglev.m で磁気浮上システムの行列とオフセットを定義します。ボールに対する磁力を発生させるコイル電流を使用して、磁気浮上で浮遊するボールの高さを制御します。
LPV モデルを作成します。
h0 = 1; % Note: Singular for h=0 G = lpvss("h",@dataFcnMaglev,0,0,h0);
この例では、磁気浮上プラントのゲイン スケジュール PD コントローラーを定義するデータ関数 maglevPD.m も用意されています。このコントローラーには時間依存の出力遅延が含まれています。この遅延は時間と共に減少します。
PD = lpvss("h",@maglevPD,0,0,h0);閉ループ応答を作成します。
CL = feedback(G*PD,1);
最初の状態である実際の軌跡 に対する応答をシミュレートします。
xinit = [h0;0;0]; % init: h=1 t = 0:1e-2:10; href = h0+0.5*sin(t); % desired height pFcn = @(t,x,u) x(1); [y1,~,x1,p1] = lsim(CL,href,t,xinit,pFcn);
シミュレーション結果をプロットし、基準の高さと比較します。
plot(t,href,t,y1,'r--') legend("Height reference","LPV simulation")
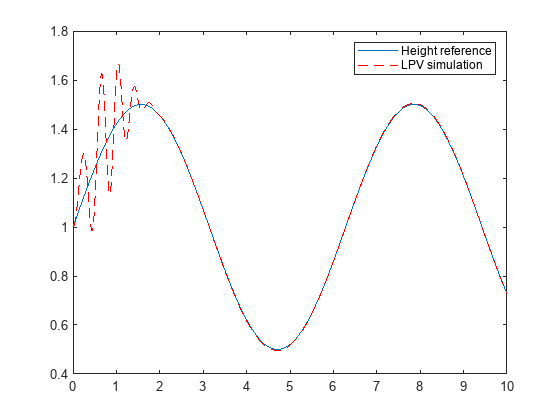
コントローラーの動作に含まれる遅延により、基準入力に正確に追従する出力信号の応答にも遅延が生じます。時間と共に遅延が減少すると、LPV シミュレーションが基準と一致します。
データ関数
type dataFcnMaglev.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = dataFcnMaglev(~,p) % MAGLEV example: % x = [h ; dh/dt] % p=hbar (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; A = [0 1;2*g/p 0]; B = [0 ; -2*sqrt(g*alpha/mb)/p]; C = [1 0]; % h D = 0; E = []; dx0 = []; x0 = [p;0]; u0 = sqrt(mb*g/alpha)*p; % ibar y0 = p; % y = h = hbar + (h-hbar) Delays = [];
type maglevPD.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = maglevPD(t,p) % Gain-scheduled PD for MAGLEV example: % dz = A(p) z + B(p) e % u = u0 + C(p) z + D(p) e % p=h (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; a0 = 2*g/p; b0 = -2*sqrt(g*alpha/mb)/p; wn = 10; zeta = 0.7; Kp = (a0+wn^2)/b0; Kd = 2*zeta*wn/b0; % linear in p % Kp = (2*zeta*wn-a0)/b0; % Kd = wn^2/b0; wf = 100; A = -wf; B = wf; C = -wf*Kd; D = Kp+wf*Kd; E = []; dx0 = []; x0 = []; u0 = []; y0 = sqrt(mb*g/alpha)*p; % ibar, feedforward term Delays.Output = 0.1/(1+t); % decreasing delay Delays.Input = NaN; end