connect
動的システムのブロック線図相互接続
構文
説明
sysc = connect(blksys,connections,inputs,outputs)blksys から sysc を作成します。行列 connections は、blksys の出力と入力がどのように相互接続されるかを指定します。インデックスベースの相互接続では、inputs と outputs は blksys のどの入力と出力が sysc の外部入力と外部出力になるかを指定するインデックス ベクトルです。この構文は、接続するすべてのモデルのあらゆる入力と出力に名前を割り当てるとは限らない場合に便利です。ただし、通常は、名前を付けた信号を追跡する方が簡単です。
sysc = connect(___,opts)sysc のダイナミクスに寄与しない未接続の状態を保持するなど、追加オプションを使用して、相互接続されているモデルを作成します。opts を作成するには、connectOptions を使用します。opts は、上記のどの構文でも入力引数とともに使用できます。
例
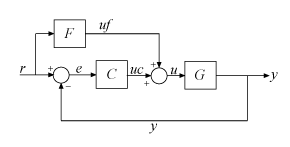
以下のような "r" から "y" へのブロック線図の統合モデルを作成します。

このモデルにはプラント G、フィードバック コントローラー C、およびフィードフォワード コントローラー F が含まれています。これらの各要素を表す動的システム モデルを作成します。
C = pid(2,1); G = zpk([],[-1,-1,-5],1); F = tf(3,[1 3]);
信号名を使用してブロック線図を作成する準備として、ブロック線図に示される入力名と出力名を各要素に割り当てます。これを行うには、要素の InputName プロパティと OutputName プロパティを設定します。
C.InputName = "e"; C.OutputName = "uc"; G.InputName = "u"; G.OutputName = "y"; F.InputName = "r"; F.OutputName = "uf";
ブロック線図には 2 つの加算結合も含まれます。1 つの加算結合は基準信号 "r" とプラント出力 "y" の差を受け取って誤差信号 "e" を計算します。もう 1 つの加算結合はフィードフォワード コントローラー出力 "uf" をフィードバック コントローラー出力 uc に加算してプラント入力 "u" を計算します。sumblkコマンドを使用してこれらの加算結合を作成します。sumblk を使用するには、加算結合の式を string として記述します。
S1 = sumblk("e = r - y"); S2 = sumblk("u = uc + uf");
sumblk は、式で指定した入力名と出力名を使用して、和を表す tf モデル オブジェクトを返します。たとえば、S1 の信号名を確認します。
S1
S1 = From input "r" to output "e": 1 From input "y" to output "e": -1 Static gain. Model Properties
ここで、すべての要素を結合して、"r" から "y" へのブロック線図内のシステムの応答を表す統合モデルを作成できます。connect に、結合する要素のリスト、統合モデルの目的の入力信号 r、および目的の出力信号 y を指定します。connect コマンドは、名前の一致する入力と出力を接続して、要素を自動的に連結します。
T = connect(G,C,F,S1,S2,"r","y"); size(T)
State-space model with 1 outputs, 1 inputs, and 5 states.
T.InputName
ans = 1×1 cell array
{'r'}
T.OutputName
ans = 1×1 cell array
{'y'}
上記の例の制御システムを作成します。ここで、G、C、および F はすべて 2 入力 2 出力のモデルです。
この例では、信号 "r"、"y"、"e" などはすべて、それぞれ 2 要素のベクトル信号です。まず、モデルを作成してその入力と出力に名前を付けます。
C = [pid(2,1), 0;
0,pid(5,6)];
F = [tf(3,[1 3]), 0;
0, tf(3,[1 3])];
G = ss(-1,[1,2],[1;-1],0);入力名と出力名を割り当てます。
C.InputName = "e"; C.OutputName = "uc"; G.InputName = "u"; G.OutputName = "y"; F.InputName = "r"; F.OutputName = "uf";
ベクトル値の信号に単一の名前を割り当てると、自動的にベクトル拡張が適用され、それぞれの入力チャネルと出力チャネルに一意の名前が付与されます。たとえば、プラント入力の名前を確認します。
G.InputName
ans = 2×1 cell
{'u(1)'}
{'u(2)'}
この例では、ブロック線図のすべての MIMO コンポーネントの信号名でベクトル拡張を使用しています。代わりに、信号に個別に名前を付けることもできます。ただし、連結する信号の名前が一致している必要があります。一部のブロック線図の要素で個別に名前を付けた信号を使用する例については、固定コンポーネントと調整可能なコンポーネントを含む MIMO 制御システムを参照してください。
次に、ベクトル値の加算結合を作成します。sumblk も、ベクトル信号に対して sum 式で指定された信号名を自動的に拡張します。これは、S2 の入力名を調べることで確認できます。
S1 = sumblk("e = r - y",2); S2 = sumblk("u = uc + uf",2); S2.InputName
ans = 4×1 cell
{'uc(1)'}
{'uc(2)'}
{'uf(1)'}
{'uf(2)'}
すべての要素を結合して、"y" に対する応答 "r" を表す統合モデル (つまり、[r(1),r(2)] から [y(1),y(2)]) を作成します。
T = connect(G,C,F,S1,S2,"r","y"); size(T)
State-space model with 2 outputs, 2 inputs, and 5 states.
T.InputName
ans = 2×1 cell
{'r(1)'}
{'r(2)'}
T.OutputName
ans = 2×1 cell
{'y(1)'}
{'y(2)'}
以下のブロック線図について考えます。
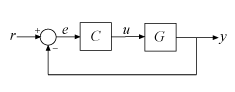
feedback を使用してこの閉ループ システムのモデルを作成し、そのモデルを使用して r から y へのシステム応答を調べることができます。プラント入力で挿入された外乱に対する閉ループ システムの応答も調べるとします。そのために、connect を使用してシステムを構築し、位置 u に解析ポイントを挿入できます。
まず、ブロック線図で示されているように入力と出力に名前を付け、プラントとコントローラーのモデルを作成します。
C = pid(2,1); C.InputName = "e"; C.OutputName = "u"; G = zpk([],[-1,-1],1); G.InputName = "u"; G.OutputName = "y";
基準信号 r とプラント出力 y の差を受け取って誤差信号 e を計算する加算結合を作成します。
Sum = sumblk("e = r - y");C、G、および加算結合を結合し、統合モデルを作成します。connect への APs 入力引数を使用して "u" に解析ポイントを挿入します。
input = "r"; output = "y"; APs = "u"; CL = connect(G,C,Sum,input,output,APs)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 3 states, and the following blocks: CONNECT_AP1: Analysis point, 1 channels, 1 occurrences. Model Properties Type "ss(CL)" to see the current value and "CL.Blocks" to interact with the blocks.
この閉ループ モデルは、AnalysisPoint制御設計ブロックを含む一般化状態空間 (genss) モデルです。CL にある解析ポイント チャネルの名前を確認するには、getPoints を使用します。
getPoints(CL)
ans = 1×1 cell array
{'u'}
解析ポイントを挿入すると、次のブロック線図と等価のモデルが作成されます。ここで、AP_u は、チャネル名 u をもつ AnalysisPoint ブロックを指しています。

この解析ポイントを使用してシステム応答を抽出します。たとえば、次のコマンドでは、u に挿入された外乱に対する u での開ループ伝達と y での閉ループ応答が抽出されます。
L = getLoopTransfer(CL,"u",-1); CLdist = getIOTransfer(CL,"u","y");
インデックスベースの相互接続を使用して、すべての入力と出力に名前を付けずに、モデル要素を接続できます。方法を理解するために、インデックスベースの相互接続を使用して、"r" から "y" までの以下のフィードバック ループのモデルを作成します。

まず、閉ループ システムの要素であるプラントとコントローラーを作成します。
C = pid(2,1); G = zpk([],[-1,-1,-5],1);
append を使用して、要素を単一の未接続の統合モデルにグループ化します。
blksys = append(C,G);
append は、以下のブロック線図に示されているように、指定したモデルを MIMO スタック モデルに配置します。
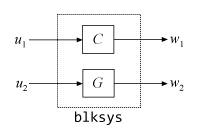
このスタック モデルをフィードバック ループに等価にするには、connect で以下の接続を行う必要があります。
Gの入力がCの出力を受け取るか、w1がu2に入力される。Cの入力がGの出力の負を受け取るか、-w2が-u1に入力される。
このような接続を行うように connect に指示するには、blksys の入力ベクトル u と出力ベクトル y で表される 1 つの接続または加算結合を各行が指定する行列を作成します。
connections = [2 1; % w1 feeds into u2 1 -2]; % -w2 feeds into u1
最後に、閉ループ モデルの外部入力と外部出力で使用する blksys の入力と出力をインデックスで指定します。
inputs = 1; % r drives u1 outputs = 2; % y is y2
これで、閉ループ モデルを完成させることができます。
sysc = connect(blksys,connections,inputs,outputs); step(sysc)

この例では、それぞれが解析ポイントをもつ、connect で作成した 2 つのモデルを結合する場合の想定される動作を示します。
次のコマンドを使用して、カスケード フィードバック ループのモデルを作成します。
G1 = tf([1],[1 0]); G1.u = 'OuterError'; G1.y = 'InnerCmd'; G2 = tf([1], [1 1]); G2.u = 'InnerError'; G2.y = 'ActuatorCmd'; SumOuter = sumblk('OuterError = OuterCmd - Outer'); SumInner = sumblk('InnerError = InnerCmd - Inner'); Sys1 = connect(G1,G2,SumOuter,SumInner,{'OuterCmd','Outer','Inner'},'ActuatorCmd', {'InnerError','OuterError'})
Generalized continuous-time state-space model with 1 outputs, 3 inputs, 2 states, and the following blocks: CONNECT_AP1: Analysis point, 2 channels, 1 occurrences. Model Properties Type "ss(Sys1)" to see the current value and "Sys1.Blocks" to interact with the blocks.
一般化モデル Sys1 には、InnerError と OuterError のチャネルをもつ単一の解析ポイント ブロックが含まれています。
あるいは、内側のループと外側のループを個別に定義することもできます。
P1 = connect(G1,SumOuter,{'OuterCmd','Outer'},'InnerCmd','OuterError')Generalized continuous-time state-space model with 1 outputs, 2 inputs, 1 states, and the following blocks: CONNECT_AP1: Analysis point, 1 channels, 1 occurrences. Model Properties Type "ss(P1)" to see the current value and "P1.Blocks" to interact with the blocks.
P2 = connect(G2,SumInner,{'InnerCmd','Inner'},'ActuatorCmd','InnerError')Generalized continuous-time state-space model with 1 outputs, 2 inputs, 1 states, and the following blocks: CONNECT_AP1: Analysis point, 1 channels, 1 occurrences. Model Properties Type "ss(P2)" to see the current value and "P2.Blocks" to interact with the blocks.
P1 と P2 の両方に CONNECT_AP1 という名前の解析ブロックがあります。次に、これらの 2 つのモデルを結合してカスケード式ループのモデル Sys2 を作成します。
Sys2 = connect(P1,P2,{'OuterCmd','Outer','Inner'},'ActuatorCmd')Generalized continuous-time state-space model with 1 outputs, 3 inputs, 2 states, and the following blocks: CONNECT_AP1: Analysis point, 1 channels, 1 occurrences. CONNECT_AP2: Analysis point, 1 channels, 1 occurrences. Model Properties Type "ss(Sys2)" to see the current value and "Sys2.Blocks" to interact with the blocks.
このモデルには、CONNECT_AP1 および CONNECT_AP2 という名前の 2 つの別々の解析ポイント ブロックが含まれています。P1 と P2 の AnalysisPoint ブロックの名前は、競合を避けるために自動的に変更されます。