series
2 つのモデルの直列接続
説明
例
2 つの SISO システムを作成します。1 つは状態空間モデル、もう 1 つは伝達関数です。
sys1 = rss(3); sys2 = tf(1,[1 1 1]);
2 つのシステムの直列接続を形成します。
sys = series(sys1,sys2); size(sys)
State-space model with 1 outputs, 1 inputs, and 5 states.
伝達関数を状態空間モデルに接続すると、別の状態空間モデルが生成されます。異なるモデル タイプを組み合わせた結果の詳細については、モデル タイプを決定するルールを参照してください。
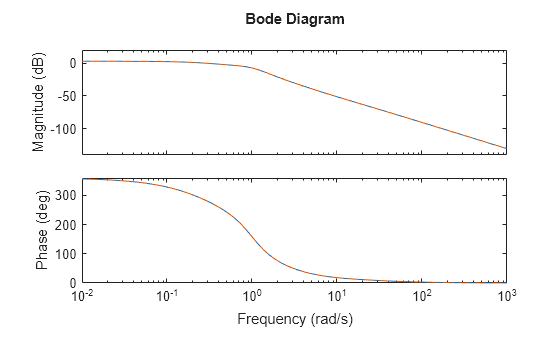
直列相互接続は、積 sys2*sys1 と等価です。周波数応答を調べてこの等価性を確認します。
sysm = sys2*sys1; bodeplot(sys,'-',sysm,'--')
2 つの MIMO システムを直列接続します。sys1 の出力数が sys2 の入力数と等しい場合、すべての sys1 出力をすべての sys2 入力に接続できます。
sys1 = rss(3,2,3); sys2 = rss(3,3,2); sys = series(sys1,sys2);
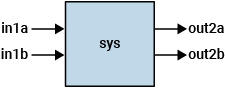
結果として得られるシステムには、sys1 と同じ数の入力と、sys2 と同じ数の出力が含まれます。
size(sys)
State-space model with 3 outputs, 3 inputs, and 6 states.
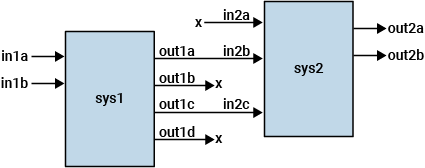
接続する信号に一致する名前を割り当てることで、直列接続を形成できます。4 出力 2 入力のシステム sys1 と 2 出力 3 入力のシステム sys2 から始めて、次のブロック線図に示されているような直列接続を形成します。
2 つのシステムの状態空間モデルを作成し、入力信号と出力信号に名前を付けます。
% sys1: 4-output, 2-input sys1 = rss(4,4,2); sys1.InputName = ["in1a","in1b"]; sys1.OutputName = ["out1a","out1b","out1c","out1d"]; % sys2: 2-output, 3-input sys2 = rss(3,2,3); sys2.InputName = ["in2a","in2b","in2c"]; sys2.OutputName = ["out2a","out2b"];
このブロック線図に示されている相互接続では、sys1 の out1a と out1c がそれぞれ in2b と in2c に接続されています。接続する信号の名前が一致するように信号名を変更します。
sys1.OutputName = ["ua","out1b","ub","out1d"]; sys2.InputName = ["in2a","ua","ub"];
name フラグを指定して series を呼び出して接続を形成します。
sys = series(sys1,sys2,"name");sys の次元、入力、および出力を調べて、接続がブロック線図のものと一致していることを確認します。
size(sys)
State-space model with 2 outputs, 2 inputs, and 7 states.
sys.InputName
ans = 2×1 cell
{'in1a'}
{'in1b'}
sys.OutputName
ans = 2×1 cell
{'out2a'}
{'out2b'}
期待どおり、結果として得られた sys には 2 つの出力と 2 つの入力があり、それぞれ sys2 の出力と sys1 の入力に対応しています。
sys は、sys2 の未接続の入力と sys1 の未接続の出力をドロップします。すべての入力と出力を保持してこの相互接続を形成するには、代わりにconnectを使用して、結果として得られるシステムで保持するすべての入力と出力を指定します。
sysc = connect(sys1,sys2,["in1a","in1b","in2a"],["out2a","out2b","out1b","out1d"]); size(sysc)
State-space model with 4 outputs, 3 inputs, and 7 states.
sysc.InputName
ans = 3×1 cell
{'in1a'}
{'in1b'}
{'in2a'}
sysc.OutputName
ans = 4×1 cell
{'out2a'}
{'out2b'}
{'out1b'}
{'out1d'}
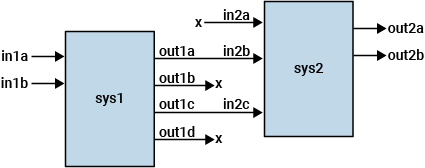
接続する信号のインデックスを指定することで、モデルの入力と出力のサブセットを使用して直列相互接続を形成できます。4 出力 2 入力のシステム sys1 と 2 出力 3 入力のシステム sys2 から始めて、次のブロック線図に示されているような直列接続を形成します。
2 つのシステムの状態空間モデルを作成します。
% sys1: 4-output, 2-input sys1 = rss(4,4,2); % sys2: 2-output, 3-input sys2 = rss(3,2,3);
直列接続を形成するには、sys1 の出力と、対応する接続先の sys2 の入力を指定するベクトルを作成します。ブロック線図では、sys1 の 1 番目と 3 番目の出力は、それぞれ sys2 の 2 番目と 3 番目の入力に接続されています。したがって、インデックスを次のように指定します。
out1 = [1 3]; % out1a and out1c in2 = [2 3]; % in2b and in2c
接続を形成し、出力のサイズを調べます。
sys = series(sys1,sys2,out1,in2); size(sys)
State-space model with 2 outputs, 2 inputs, and 7 states.
期待どおり、結果として得られた sys には 2 つの出力と 2 つの入力があり、それぞれ sys2 の出力と sys1 の入力に対応しています。sys は、sys2 の未接続の入力と sys1 の未接続の出力をドロップします。すべての入力と出力を保持してこの相互接続を形成するには、connectを使用します。
入力引数
出力引数
バージョン履歴
R2006a より前に導入