航空機の非線形ピッチ ダイナミクスのゲイン スケジュール コントローラーの設計と検証
この例では、線形パラメーター変動状態空間モデルを使用して非線形システムのゲイン スケジュール コントローラーを設計して検証する方法を示します。この例では、LTI システムの配列を使用した非線形動作の近似 (Simulink Control Design)の例を基に、コマンド ラインで非線形動作を近似する方法を示します。
この例では、次を行います。
平衡点のグリッドで非線形の Simulink® モデルを線形化します。
LTI モデルと平衡オフセットのグリッド配列から LPV モデルを作成します。
平衡点のグリッドでコントローラーを設計します。このグリッドは、線形化に使用されるグリッドとは異なる場合があります。
コマンド ラインの LTI シミュレーション (固定の操作点) と LPV シミュレーション (パラメーターの軌跡を指定) を使用してコントローラーをテストします。
Simulink の非線形プラントでコントローラーをテストします。
航空機モデル
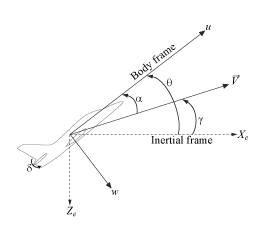
機体のピッチ軸ダイナミクスの 3 自由度のモデルについて考えます。状態には、地球座標 (,)、機体座標 (,)、ピッチ角度 、ピッチ レート があります。次の図では、慣性座標系および機体座標系、飛行経路の角度 、入射角 、ピッチ角 の関係をまとめています。
機体のダイナミクスは非線形であり、空力およびモーメントは速度 と入射角 に依存します。scdairframeOpenLoop モデルは、これらのダイナミクスを示しています。
open_system("scdairframeOpenLoop")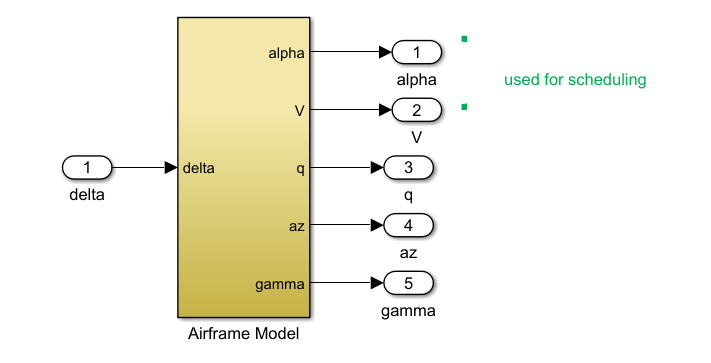
操作条件の範囲
入射角 は –20 ~ 20 度の間で変動し、速度 は 700 ~ 1400 m/s の間で変動すると仮定します。スケジューリングに、線形に等間隔な (,) ペアの 15 行 12 列のグリッドを使用します。
nA = 15; % number of alpha values nV = 12; % number of V values alphaRange = linspace(-20,20,nA)*pi/180; VRange = linspace(700,1400,nV); [alpha,V] = ndgrid(alphaRange,VRange);
バッチ平衡化
各飛行条件 (,) に対して、平衡点における機体のダイナミクスを線形化します (法線加速度とピッチのモーメントが 0)。そのためには、 および が定常値となる昇降舵の偏向角 およびピッチ レート を計算する必要があります。
for ct = 1:nA*nV alpha_ini = alpha(ct); % Incidence [rad] v_ini = V(ct); % Speed [m/s] % Specify trim condition opspec(ct) = operspec("scdairframeOpenLoop"); % Xe,Ze: known, not steady. opspec(ct).States(1).Known = [1;1]; opspec(ct).States(1).SteadyState = [0;0]; % u,w: known, w steady opspec(ct).States(3).Known = [1 1]; opspec(ct).States(3).SteadyState = [0 1]; % theta: known, not steady opspec(ct).States(2).Known = 1; opspec(ct).States(2).SteadyState = 0; % q: unknown, steady opspec(ct).States(4).Known = 0; opspec(ct).States(4).SteadyState = 1; end opspec = reshape(opspec,[nA nV]);
すべての操作点仕様でモデルを平衡化します。
opt = findopOptions("DisplayReport","off","OptimizerType","lsqnonlin"); opt.OptimizationOptions.Algorithm = "trust-region-reflective"; [op,report] = findop("scdairframeOpenLoop",opspec,opt);
バッチ線形化
モデルを線形化するには、最初に線形化の入力ポイントと出力ポイントを指定します。
io = [linio("scdairframeOpenLoop/delta",1,"in"); % delta linio("scdairframeOpenLoop/Airframe Model",1,"out"); % alpha linio("scdairframeOpenLoop/Airframe Model",2,"out"); % V linio("scdairframeOpenLoop/Airframe Model",3,"out"); % q linio("scdairframeOpenLoop/Airframe Model",4,"out"); % az linio("scdairframeOpenLoop/Airframe Model",5,"out")]; % gamma
それぞれの平衡化条件でモデルを線形化します。線形化のオフセット情報を構造体 info に保存します。
linOpt = linearizeOptions("StoreOffsets",true); [G,~,info] = linearize("scdairframeOpenLoop",op,io,linOpt); G = reshape(G,[nA nV]); G.u = 'delta'; G.y = {'alpha','V','q','az','gamma'}; G.SamplingGrid = struct("alpha",alpha,"V",V);
G は、180 の飛行条件 (,) における線形化されたプラント モデルの 15 行 12 列の配列です。
bodemag(G(3:5,:,:,:))
title("Variations in airframe dynamics")
ssInterpolant を使用して、これらの線形化されたモデルをグリッド点間に内挿する LPV モデルを作成します。
offsets = info.Offsets; Glpv = ssInterpolant(G,offsets);
制御設計: ピッチ軸の安定増大
制御設計の (,) グリッドは、プラント モデルのグリッドに比べて粗く、範囲が小さくなっています。
nAcd = 5; % number of alpha values nVcd = 3; % number of V values alphacd = linspace(-10,10,nAcd)*pi/180; Vcd = linspace(900,1200,nVcd); [alphacd,Vcd] = ndgrid(alphacd,Vcd); Ncd = nAcd*nVcd;
ピッチ レート ループには 2-DOF のゲイン スケジュール アーキテクチャを使用します。これにより、誤差信号 の I のみの項が の比例項に結合されます。
調整可能なゲイン および は、(,) に対する線形依存性があるゲイン曲面として定義されます。
s = tf("s"); Domain = struct("alpha",alphacd,"V",Vcd); ShapeFcn = @(x,y) [x y]; Ki = tunableSurface("Ki",-1,Domain,ShapeFcn); Kp = tunableSurface("Kp",1,Domain,ShapeFcn); K = [Ki/s Kp] * [1 -1;0 1]; K.InputName = {'qref';'q'}; K.OutputName = {'delta'};
機体の LPV モデルを調整グリッド (alphacd,Vcd) でサンプリングし、閉ループ モデルを作成します。
[Ga,Goffsets] = sample(Glpv,[],alphacd,Vcd); T0 = connect(Ga,K,'qref','q','delta');
Warning: The following block outputs are not used: alpha,V,az,gamma.
ステップ応答とループ整形の要件に従ってゲイン曲面を調整します。
R1 = TuningGoal.StepTracking("qref","q",1/2); R2 = TuningGoal.MaxLoopGain("delta",50,1); R3 = TuningGoal.MaxGain("qref","q",tf(15,[1 0.01])); T = systune(T0,[R1 R2],R3);
Final: Soft = 4.94, Hard = 0.19413, Iterations = 30
Warning: StepTracking goal: Feedback configuration has fixed integrators that cannot be stabilized with available tuning parameters. Make sure these are modeling artifacts rather than physical instabilities.
showTunable(T)
Ki =
-4.4209 -0.0712 1.2825
-----------------------------------
Kp =
1.1167 -0.0000 -0.2609
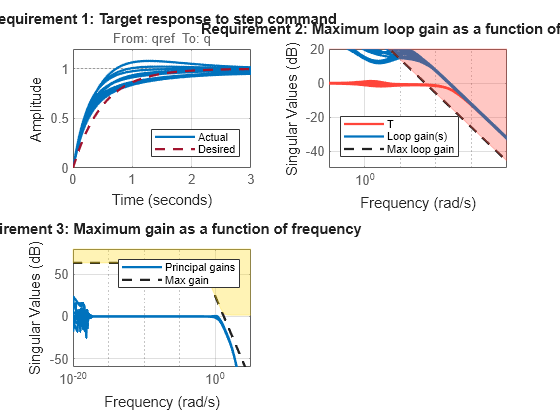
調整結果を表示します。
viewGoal([R1 R2 R3],T)
調整後のゲイン曲面は、 に対する依存性が弱く、 に対する依存性が強くなっています。
Ki = setBlockValue(Ki,T); clf subplot(211) viewSurf(Ki) Kp = setBlockValue(Kp,T); subplot(212) viewSurf(Kp)

LPV コントローラーを作成します。コントローラーで平衡性についての段階的な補正を行うように、平衡偏向角を出力のオフセットとして含めます。
Ka = ss(setBlockValue(K,T));
Koffsets = reshape(struct("y",{Goffsets.u}),size(Goffsets));
Klpv = ssInterpolant(Ka,Koffsets);閉ループ LPV モデルを作成します。プラントとコントローラーのサンプリングと内挿を 2 つの異なる (,) グリッドで行っていることに注意してください。
Tlpv = feedback(Glpv*Klpv,1,2,3,+1);
Tlpv = Tlpv(:,1); % from qref to plant outputs設計グリッドでの から までの閉ループ応答をプロットします。
clf
step(sample(Tlpv(3,:),[],alphacd,Vcd),6);
grid
title("Closed-loop response qref to q on design grid")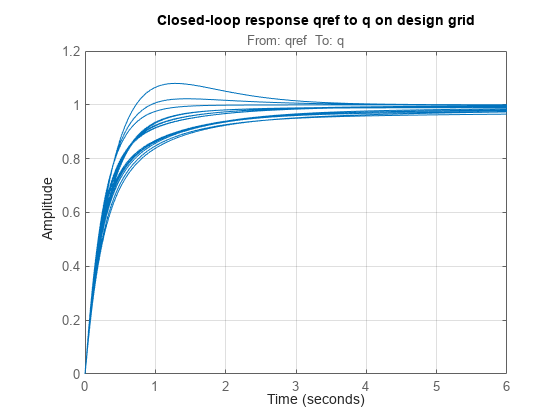
非線形シミュレーション
非線形と LPV のシミュレーションを比較するために、いずれかの平衡操作点から初期化されるピッチ レート ループのステップ応答をシミュレートします。この平衡化条件は密なグリッドで選択され、設計グリッドには属しません。
aidx = 9; Vidx = 6; alpha0 = alphaRange(aidx); V0 = VRange(Vidx); q0 = offsets(aidx,Vidx).x(4);
LPV コントローラーの初期状態 を選択して、選択された操作点に対する平衡偏向角 を提供します。LPV コントローラーの出力は次のとおりです。
は次を満たさなければなりません。
K0 = sample(Klpv,[],alpha0,V0); xK0 = -K0.C\K0.D(2)*q0;
(alpha0,V0) の平衡化条件から開始して、t=0 における q0 から q0+0.05 までのステップ変化を適用します。
tstep = 0; rstep0 = q0; rStepAmp = 0.05; rstepf = rstep0+rStepAmp; Tf = 5;
閉ループの Simulink モデルを開き、非線形シミュレーションを初期化します。
open_system("scdairframeClosedLoop")
alpha_ini = alpha0;
v_ini = V0;
q_ini = q0;
yK0 = reshape([Koffsets.y],[1 1 nAcd nVcd]);非線形シミュレーションの結果を取得します。
sim("scdairframeClosedLoop",[0 tstep+Tf]);
tsim = y.Time;
ysim = y.Data;比較のために、最初に次の操作条件で LTI の応答を計算します。
t = linspace(0,Tf,250); y = step(sample(Tlpv,[],alpha0,V0),t); ylin = [alpha0,V0,q0] + rStepAmp * y(:,1:3);
LPV シミュレーション
非線形の機体モデルの LPV 近似 Glpv を使用して応答を計算します。これを行うには、 の軌跡が必要です。1 つ目の選択肢として、上記の LTI シミュレーションから得られるおおよその軌跡を使用できます ( と が Tlpv の最初の 2 つの出力であることを思い出してください)。
p_ideal = ylin(:,1:2);
プラントの初期状態は平衡化解析から取得できます。Klpv の初期状態 xK0 を加えることで全体の初期状態 xinit が得られます。
xinit = [offsets(aidx,Vidx).x ; xK0];
おおよそのパラメーターの軌跡 p_ideal を使用して LPV の応答をシミュレートします。
qref = rstepf*ones(1,numel(t)); y1 = lsim(Tlpv,qref,t,xinit,p_ideal);
実際のパラメーターの軌跡は、, が状態 , に次のように依存するため内因的なものになります。
より正確な結果を得るために、この依存関係を関数 を使用して記述できます。
pFcn = @(t,x,u) [atan2(x(3),x(2)) ; sqrt(x(2)^2+x(3)^2)]; [y2,~,~,p2] = lsim(Tlpv,qref,t,xinit,pFcn);
シミュレーション結果を比較します。
figure(1) clf subplot(411) plot(t,y1(:,1),t,y2(:,1),t,ylin(:,1),tsim,ysim(:,1),"k--") ylabel("alpha") grid on title("Linear, LPV, and Nonlinear Simulations") legend("p ideal","p true","Linear","Nonlinear","location","southeast") subplot(412) plot(t,y1(:,2),t,y2(:,2),t,ylin(:,2),tsim,ysim(:,2),"k--") ylabel("V") grid on subplot(413) plot(t,y1(:,3),t,y2(:,3),t,ylin(:,3),tsim,ysim(:,3),"k--") ylabel("q") grid on subplot(414) plot(t,y1(:,5),t,y2(:,5),tsim,ysim(:,5),"k--") ylabel("gamma") grid on
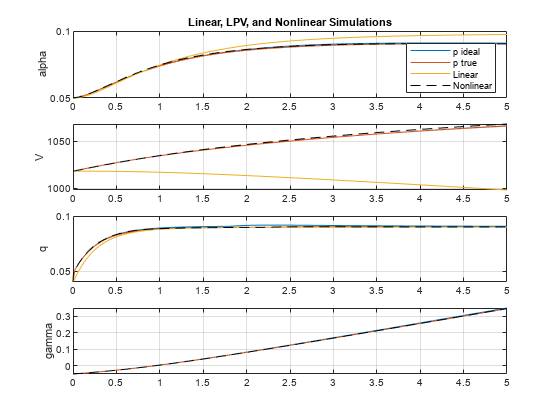
LPV シミュレーションは非線形シミュレーションに非常に近く、機体の LPV モデルが有効な代理となり、ゲイン スケジュール LPV コントローラーの性能が十分であることがわかります。予想どおり、実際のパラメーターの軌跡を使用した LPV シミュレーションの方が代理で p_ideal を使用した場合よりも精度が少し高くなっています。
モデルを閉じます。
bdclose("scdairframeOpenLoop") bdclose("scdairframeClosedLoop")
参考
ssInterpolant | sample | linearize (Simulink Control Design) | systune | ndgrid