ssInterpolant
構文
説明
ssInterpolant は、時間またはパラメーター空間でサンプリングした局所的な ss モデルの集合について、線形時変 (LTV) または線形パラメーター変動 (LPV) の大域的な動作に LTI の局所的な動作を内挿する LTV モデルまたは LPV モデルを作成します。ssInterpolant を使用して、解析的な LTV モデルまたは LPV モデルをグリッド付きの LTV モデルまたは LPV モデルにしたり、グリッド付きの LTV モデルまたは LPV モデルをリサンプリングしたりすることもできます。
例
この例では、貯水槽の Simulink® モデルのバッチ線形化から取得した状態空間モデルの配列と関連オフセットから LPV モデルを作成する方法を示します。
Simulink モデルを開きます。
mdl = 'watertankNLModel';
open_system(mdl)水位の初期条件を指定します。
h0 = 10;
モデルの線形解析ポイントを指定します。
io(1) = linio('watertankNLModel/Step',1,'input'); io(2) = linio('watertankNLModel/H',1,'output');
モデルをシミュレートし、時間スナップショットで操作点を抽出します。
tlin = [0 30 40 50 60 70 80]; op = findop(mdl,tlin);
線形化をオフセットと共に計算します。
options = linearizeOptions('StoreOffsets',true);
[linsys,~,info] = linearize(mdl,io,op,options);高さの値のグリッドを指定し、LPV モデルを作成します。このモデルでは、高さは最初の状態です。
h = zeros(size(tlin)); for ct=1:numel(h) h(ct) = op(ct).States(1).x; end linsys.SamplingGrid.H = h; linsys.Offsets = info.Offsets;
gLPV = ssInterpolant(linsys,'spline')Continuous-time state-space LPV model with 1 outputs, 1 inputs, 1 states, and 1 parameters. Model Properties
watertank モデルをシミュレートします。
h0 = 15; sim(mdl); usim = getElement(logsOut,'V'); hsim = getElement(logsOut,'H');
正確なパラメーターの軌跡を使用して LPV モデルをシミュレートします。
t = linspace(0,150,200); p = @(t,x,u) x(1); u = interp1(usim.Values.Time,usim.Values.Data,t); ylpv = lsim(gLPV,u,t,h0,p);
結果をプロットします。
plot(hsim.Values.Time,hsim.Values.Data,t,ylpv,'--') legend('Simulink model','LPV model')
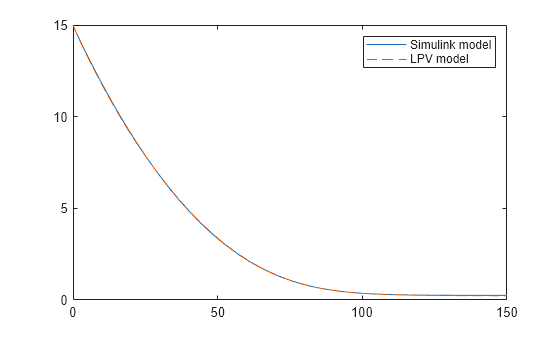
LPV モデルは非線形モデルの良好な近似を示しています。
この例では、dataFcnMaglev.m で磁気浮上システムの行列とオフセットを定義します。ボールに対する磁力を発生させるコイル電流を使用して、磁気浮上で浮遊するボールの高さを制御します。
LPV モデルを作成します。
h0 = 1;
lpvSys = lpvss('h',@dataFcnMaglev,0,0,h0)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
lpvSys.StateName = {'h','hdot'};
lpvSys.InputName = 'current';
lpvSys.InputName = 'height';高さ h について、パラメーターの変化を定義します。
hmin = 0.05; hmax = 0.25; hcd = linspace(hmin,hmax,5); SamplingGrid.h = hcd;
グリッド付きモデルに変換します。
glpvSys1 = ssInterpolant(lpvSys,SamplingGrid)
Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
このコマンドは、同じパラメーター空間でサンプリングされたローカル モデルの配列からグリッド付きモデルを作成することと等価です。
ssArray = psample(lpvSys,SamplingGrid); glpvSys2 = ssInterpolant(ssArray);
この例では、バッチ線形化の結果からの LPV モデルの作成の例で貯水槽の Simulink® モデルのバッチ線形化から取得した状態空間モデルの配列と関連オフセットについて考えます。
この貯水槽システムのダイナミクスは次の方程式で記述されます。
線形化の結果を読み込みます。
load watertankLinModel.mat内挿法 spline と外挿法 clip を使用してグリッド付きモデルを作成します。
glpv1 = ssInterpolant(linsys,info.Offsets,"spline","clip");
外挿 spline を使用してグリッド付きモデルを作成します。
glpv2 = ssInterpolant(linsys,info.Offsets,"spline","spline");
作成するグリッドの外の点から初期の高さが始まる場合における、両方のグリッド付きモデルのシミュレーション結果を比較します。水槽がほぼ空になるように高さを設定します。
h0 = 0.4; sim("watertankNLModel.slx"); usim = getElement(logsOut,"V"); hsim = getElement(logsOut,"H");
正確なパラメーターの軌跡を使用して LPV モデルをシミュレートします。
t = linspace(0,150,200); p = @(t,x,u) x(1); u = interp1(usim.Values.Time,usim.Values.Data,t); ylpv1 = lsim(glpv1,u,t,h0,p); ylpv2 = lsim(glpv2,u,t,h0,p); plot(t,ylpv1,t,ylpv2,"--",hsim.Values.Time,hsim.Values.Data,".-") legend("clip extrapolation","spline extrapolation", ... "nonlinear simulation",Location="best")
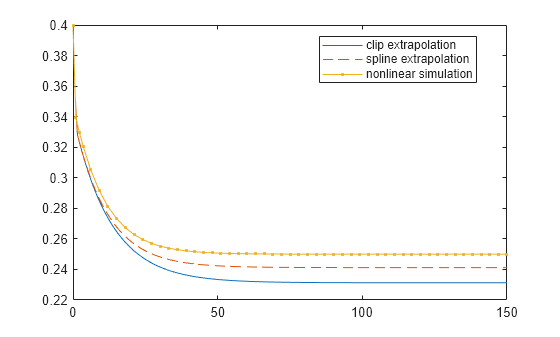
水槽がほぼ空になったときの非線形性による傾きの急な変化について、clip メソッドよりも spline メソッドで適切に取得されています。
入力引数
出力引数
制限
散布内挿 (R2023b 以降)は、3 次元までのパラメーター グリッドでのみサポートされます。