getIOTransfer
slLinearizer または slTuner インターフェイスを使用して指定された I/O セットの伝達関数
構文
説明
linsys = getIOTransfer(s,in,out)slLinearizer または slTuner インターフェイス s に関連付けられたモデルの指定された入力および出力の伝達関数を返します。
ソフトウェアでは、linsys を計算する際、s に対して指定した永続的な開始点はすべて強制適用されます。getIOTransfer が in および out を処理する方法の詳細については、伝達関数を参照してください。s.Parameters、s.OperatingPoints、またはその両方を設定している場合、getIOTransfer は複数の線形化を実行し、伝達関数の配列を返します。
例
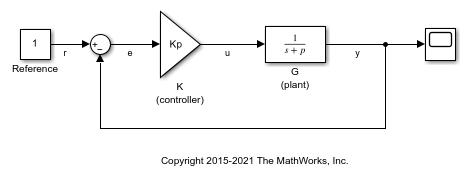
ex_scd_simple_fdbk モデルで基準信号 r からプラント出力 y への閉ループ伝達関数を取得します。
ex_scd_simple_fdbk モデルを開きます。
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);
![]()
このモデルには次の項目が含まれています。

モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
基準信号 r からプラント出力 y への閉ループ伝達関数を取得するには、両方の点を sllin に追加します。
addPoint(sllin,{'r','y'});
r から y への閉ループ伝達関数を取得します。
sys = getIOTransfer(sllin,'r','y'); tf(sys)
ans =
From input "r" to output "y":
3
-----
s + 8
Continuous-time transfer function.
ソフトウェアは、r で線形化入力 dr を追加し、y で線形化出力を追加します。
![]()
sys は dr から y への伝達関数であり、 と等価です。
と等価です。
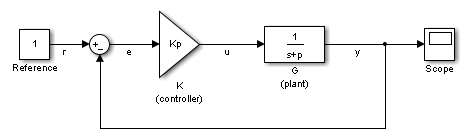
ex_scd_simple_fdbk モデルで、プラント モデル伝達関数 G を取得します。
ex_scd_simple_fdbk モデルを開きます。
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);
このモデルには次の項目が含まれています。

モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
プラント モデルの伝達関数を取得するには、入力ポイントとして u、出力ポイントとして y を使用します。フィードバックの影響を取り除くには、ループを中断しなければなりません。ループは、u、e、または y で中断できます。この例では、u でループを中断します。これらの点を sllin に追加します。
addPoint(sllin,{'u','y'});
プラント モデル伝達関数を取得します。
sys = getIOTransfer(sllin,'u','y','u'); tf(sys)
ans =
From input "u" to output "y":
1
-----
s + 5
Continuous-time transfer function.
2 番目の入力引数で入力として u を指定し、4 番目の入力引数で一時的ループ開始点として u を指定します。
sys は du から y への伝達関数であり、 と等価です。
と等価です。
複数の伝達関数に対して scdcascade モデルをバッチ線形化するとします。ほとんどの線形化では、C2 コントローラーの比例ゲイン (Kp2) と積分ゲイン (Ki2) を 10% の範囲で変化させます。この例では、Kp2 および Ki2 の最大値について、e2 から y2 への内側のループの開ループ応答伝達関数を計算します。
scdcascade モデルを開きます。
mdl = 'scdcascade';
open_system(mdl)
![]()
モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
C2 コントローラーの比例ゲイン (Kp2) および積分ゲイン (Ki2) を 10% の範囲で変化させます。
Kp2_range = linspace(0.9*Kp2,1.1*Kp2,3); Ki2_range = linspace(0.9*Ki2,1.1*Ki2,5); [Kp2_grid,Ki2_grid] = ndgrid(Kp2_range,Ki2_range); params(1).Name = 'Kp2'; params(1).Value = Kp2_grid; params(2).Name = 'Ki2'; params(2).Value = Ki2_grid; sllin.Parameters = params;
内側のループの開ループ伝達関数を計算するには、e2 および y2 を解析ポイントとして使用します。外側のループの影響を取り除くには、e2 でループを中断します。解析ポイントとして e2 と y2 を sllin に追加します。
addPoint(sllin,{'e2','y2'})
Ki2 および Kp2 の最大値のインデックスを決定します。
mdl_index = params(1).Value == max(Kp2_range) & params(2).Value == max(Ki2_range);
e2 から y2 への開ループ伝達関数を取得します。
sys = getIOTransfer(sllin,'e2','y2','e2',mdl_index);
Simulink® モデルを開きます。
mdl = 'scdcascade';
open_system(mdl)
![]()
線形化オプション セットを作成し、StoreOffsets オプションを設定します。
opt = linearizeOptions('StoreOffsets',true);
slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl,opt);
解析ポイントを追加して閉ループ伝達関数を計算します。
addPoint(sllin,{'r','y1m'});
入力/出力伝達関数を計算し、対応する線形化オフセットを取得します。
[sys,info] = getIOTransfer(sllin,'r','y1m');
オフセットを表示します。
info.Offsets
ans =
struct with fields:
dx: [6×1 double]
x: [6×1 double]
u: 1
y: 0
OutputName: {'y1m'}
InputName: {'r'}
StateName: {6×1 cell}
Ts: 0
入力引数
出力引数
詳細
"伝達関数" とは、線形化出力ポイントにおける線形化入力に対する LTI システムの応答です。伝達関数で線形解析を実行し、システムの安定性、時間領域の特性または周波数領域の特性を理解します。
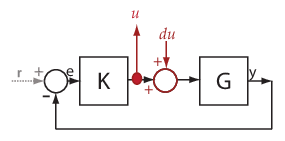
与えられたブロック線図で複数の伝達関数を計算できます。ex_scd_simple_fdbk モデルを考えます。
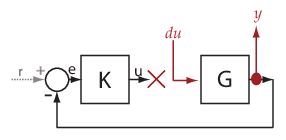
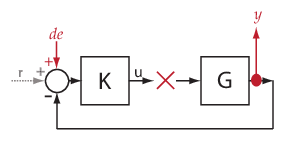
基準入力信号からプラント出力信号への伝達関数を計算できます。"基準入力" ("設定点" とも呼ばれる) r は Reference ブロックで発生し、"プラント出力" y は G ブロックで発生します。この伝達関数は、"閉ループ全体の" 伝達関数とも呼ばれます。この伝達関数を計算するために、ソフトウェアは、r で線形化入力 dr を追加し、y で線形化出力を追加します。
![]()
ソフトウェアは、dr から y への伝達関数として閉ループ全体の伝達関数を計算します。これは、(I+GK)-1GK と同じです。
r から y への伝達関数が dr から y への伝達関数と同じになることを確認します。
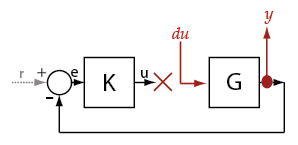
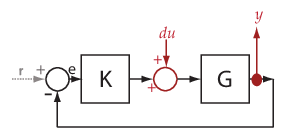
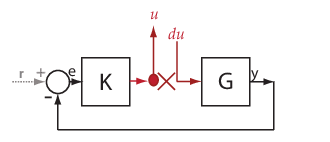
プラント入力 u からプラント出力 y への "プラント伝達関数" を計算できます。プラントのダイナミクスをフィードバック ループの影響から切り離すには、y、e、または図のように u にループの中断 (つまり "開始点") を導入します。
ソフトウェアはループを中断し、u で線形化入力 du を追加し、y で線形化出力を追加します。このプラント伝達関数は、du から y への伝達関数 (G) と同じです。
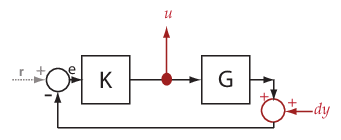
同様に、"コントローラー伝達関数" を取得するには、コントローラー入力 e からコントローラー出力 u への伝達関数を計算します。y、e または u でフィードバック ループを中断します。
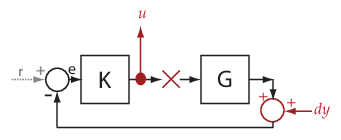
getIOTransfer を使用して、さまざまな開ループまたは閉ループの伝達関数を取得できます。伝達関数を設定するには、任意の組み合わせで入力、出力および開始点 (一時的または永続的) として解析ポイントを指定します。ソフトウェアはそれぞれの組み合わせを一意的に処理します。次のコードについて考えます。これは、解析ポイント u を使用して伝達関数を取得するいくつかの方法を示します。
sllin = slLinearizer('ex_scd_simple_fdbk') addPoint(sllin,{'u','e','y'}) T0 = getIOTransfer(sllin,'e','y','u'); T1 = getIOTransfer(sllin,'u','y'); T2 = getIOTransfer(sllin,'u','y','u'); T3 = getIOTransfer(sllin,'y','u'); T4 = getIOTransfer(sllin,'y','u','u'); T5 = getIOTransfer(sllin,'u','u'); T6 = getIOTransfer(sllin,'u','u','u');
T0 では、u でループの中断を指定します。T1 では、u で入力のみを指定します。T2 では、u で入力および開始点 ("開ループの入力" とも呼ばれる) を指定します。T3 では、u で出力のみを指定します。T4 では、u で出力および開始点 ("開ループの出力" とも呼ばれる) を指定します。T5 では、u で入力および出力 ("相補感度ポイント" とも呼ばれる) を指定します。T6 では、u で入力、出力および開始点 ("ループ伝達ポイント" とも呼ばれる) を指定します。次の表は、getIOTransfer が解析ポイントを処理する方法を示します。ここでは、u のさまざまな使用方法に注目します。
u の指定内容 | getIOTransfer による解析ポイントの処理 | 伝達関数 |
|---|---|---|
ループの中断 コード例: T0 = getIOTransfer(...
sllin,'e','y','u') |
ソフトウェアは | |
入力 コード例: T1 = getIOTransfer(...
sllin,'u','y') |
ソフトウェアは、 | |
開ループの入力 コード例: T2 = getIOTransfer(...
sllin,'u','y','u') |
ソフトウェアは | |
出力 コード例: T3 = getIOTransfer(...
sllin,'y','u') |
ソフトウェアは、 | |
開ループの出力 コード例: T4 = getIOTransfer(...
sllin,'y','u','u') |
ソフトウェアは | |
相補感度ポイント コード例: T5 = getIOTransfer(...
sllin,'u','u')ヒント
|
ソフトウェアは、 | |
ループ伝達関数の点 コード例: T6 = getIOTransfer(...
sllin,'u','u','u')ヒント
|
ソフトウェアは | |
ソフトウェアは、伝達関数を計算する際に Simulink モデルを変更しません。