getCompSensitivity
slLinearizer または slTuner インターフェイスを使用する、指定された点での相補感度関数
構文
説明
linsys = getCompSensitivity(s,pt,temp_opening)temp_opening で指定された点にある追加の一時的な開始点を考慮に入れます。開始点を使用して、たとえば、外側のループが開いた状態で内側のループの相補感度関数を計算します。
例
ex_scd_simple_fdbk モデルのプラント出力で計算された相補感度関数を取得します。
ex_scd_simple_fdbk モデルを開きます。
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);
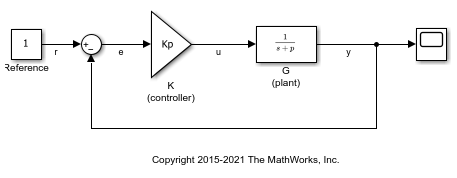
このモデルには次の項目が含まれています。

モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
プラント出力での相補感度関数を計算するには、y 信号を解析ポイントとして使用します。この点を sllin に追加します。
addPoint(sllin,'y');
y での相補感度関数を取得します。
sys = getCompSensitivity(sllin,'y');
tf(sys)
ans = From input "y" to output "y": -3 ----- s + 8 Continuous-time transfer function.
ソフトウェアは y に線形化出力を追加し、その後に線形化入力 dy を加えます。
sys は dy から y への伝達関数であり、 と等価です。
と等価です。
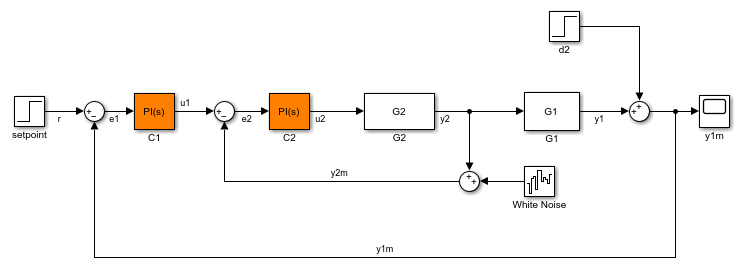
scdcascade モデルでは、y2 における内側のループの相補感度関数を取得します。
scdcascade モデルを開きます。
mdl = 'scdcascade';
open_system(mdl)
モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
y2 における内側のループの相補感度伝達関数を計算するには、y2 信号を解析ポイントとして使用します。外側のループの影響を取り除くには、y1m で外側のループを中断します。これら両方の点を sllin に追加します。
addPoint(sllin,{'y2','y1m'});
y2 における内側のループの相補感度関数を取得します。
sys = getCompSensitivity(sllin,'y2','y1m');
ここで、3 番目の入力引数 'y1m' は、外側のループの一時的な開始点を指定します。
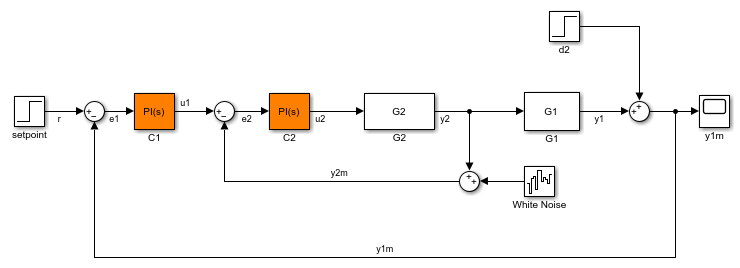
複数の伝達関数に対して scdcascade モデルをバッチ線形化するとします。ほとんどの線形化では、C2 コントローラーの比例ゲイン (Kp2) と積分ゲイン (Ki2) を 10% の範囲で変化させます。この例では、Kp2 および Ki2 の最大値で内側のループの相補感度関数を計算します。
scdcascade モデルを開きます。
mdl = 'scdcascade';
open_system(mdl);
モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
C2 コントローラーの比例ゲイン (Kp2) および積分ゲイン (Ki2) を 10% の範囲で変化させます。
Kp2_range = linspace(0.9*Kp2,1.1*Kp2,3); Ki2_range = linspace(0.9*Ki2,1.1*Ki2,5); [Kp2_grid,Ki2_grid]=ndgrid(Kp2_range,Ki2_range); params(1).Name = 'Kp2'; params(1).Value = Kp2_grid; params(2).Name = 'Ki2'; params(2).Value = Ki2_grid; sllin.Parameters = params;
内側のループの相補感度を計算するには、y2 信号を解析ポイントとして使用します。外側のループの影響を取り除くには、y1m で外側のループを中断します。これら両方の点を sllin に追加します。
addPoint(sllin,{'y2','y1m'})
Ki2 および Kp2 の最大値のインデックスを決定します。
mdl_index = params(1).Value == max(Kp2_range) & params(2).Value == max(Ki2_range);
y2 で相補感度伝達関数を取得します。
sys = getCompSensitivity(sllin,'y2','y1m',mdl_index);
Simulink® モデルを開きます。
mdl = 'watertank';
open_system(mdl)

線形化オプション セットを作成し、StoreOffsets オプションを設定します。
opt = linearizeOptions('StoreOffsets',true);
slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl,opt);
タンクの出力端子で解析ポイントを追加します。
addPoint(sllin,'watertank/Water-Tank System');
y で相補感度関数を計算し、対応する線形化オフセットを取得します。
[sys,info] = getCompSensitivity(sllin,'watertank/Water-Tank System');
オフセットを表示します。
info.Offsets
ans =
struct with fields:
dx: [2×1 double]
x: [2×1 double]
u: 1
y: 1
OutputName: {'watertank/Water-Tank System'}
InputName: {'watertank/Water-Tank System'}
StateName: {2×1 cell}
Ts: 0
入力引数
解析ポイント信号名。以下で指定します。
文字ベクトルまたは string — 解析ポイント信号名。
解析ポイントに関連付けられた信号名を確認するには、
sと入力します。MATLAB® コマンド ウィンドウにsの内容が表示されます。これには、解析ポイント信号名、ブロック名および端子番号が含まれます。解析ポイントに信号名がなく、ブロック名と端子番号のみがあるとします。ブロック名としてptを指定できます。sの解析ポイントのリストにないポイントを使用するには、最初にaddPointを使用してポイントを追加します。完全な信号名またはブロック名の一意的に一致する部分として
ptを指定できます。解析ポイントの完全な信号名が'LoadTorque'であるとします。'Torque'がsの他の解析ポイントの信号名の一部でない限り、ptを'Torque'と指定できます。たとえば、
pt = 'y1m'とします。文字ベクトルの cell 配列または string 配列 — 複数の解析ポイント名を指定します。たとえば、
pt = {'y1m','y2m'}とします。
linsys を計算するために、ソフトウェアは pt で線形化出力を追加し、その後に線形化入力を追加します。
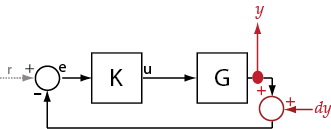
以下のモデルを考えます。
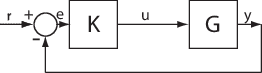
'y' として pt を指定します。
ソフトウェアは、dy から y への伝達関数として linsys を計算します。
pt を複数の信号として指定する場合 (たとえば、pt = {'u','y'})、ソフトウェアは各点で、線形化出力を追加し、その後に線形化入力を追加します。
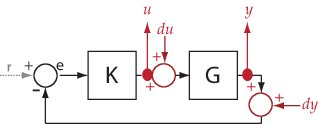
du と dy は線形化入力で、u と y は線形化出力です。ソフトウェアは、各線形化入力から各線形化出力への伝達関数をもつ MIMO 伝達関数として linsys を計算します。
出力引数
詳細
ある点での "相補感度関数" とは、その点での加法的な外乱から同じ点での測定への伝達関数のことです。感度関数とは対照的に、測定の "後に" 外乱が追加されます。
解析ポイント x での相補感度関数を計算するために、ソフトウェアは x で線形化出力を追加し、その後に線形化入力 dx を追加します。相補感度関数は、dx から x への伝達関数です。
| Simulink モデルでの解析ポイント | getCompSensitivity による解析ポイントの解釈 | 相補感度関数 |
|---|---|---|
|
|
|
|

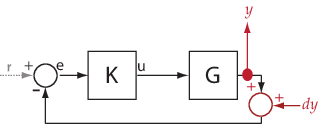
たとえば、y での相補感度関数を計算する次のモデルについて考えます。
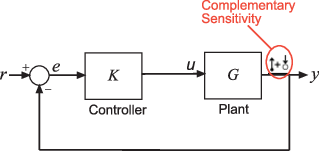
ここで、ソフトウェアは y で線形化出力を追加し、その後に線形化入力 dy を追加します。y での相補感度関数 T は、dy から y への伝達関数です。T は、以下のように計算されます。
ここで、I は GK と同じサイズの単位行列です。y での相補感度達関数は、r から y への閉ループ伝達関数に -1 を掛け合わせたものと同じです。
一般的には、基準信号からプラント出力まで計算される相補感度関数 T は、I–S と同じです。ここで、S はこの点での感度関数で、I は同じサイズの単位行列です。ただし、getCompSensitivity は、線形化の出力と入力を "同じ点" で追加するため、getCompSensitivity が返す T は、S–I と等しくなります。
ソフトウェアは、相補感度関数を計算する際に Simulink モデルを変更しません。